

化学机械抛光设备的仿真试验
发布时间:2017/12/5 21:07:06 访问次数:577
硅片加工涉及多次薄膜的生长及去除过程,目的是形成具有一定功能的电路层。建立NE3210S01器件结构和多层连线会很自然地形成台阶,使硅片表面不平坦。芯片内电路层数越多,这种表面起伏越严重,这对后续的图形形成、芯片的成品率和长期可靠性有非常严重的影响,所以要对硅片进行平坦化(抛光)处理。⒛世纪qO年代以来,化学机械平坦化已成为最重要的平坦化技术。化学机械抛光是一种表面全局平坦化技术,它通过晶圆和一个抛光头之间的相对运动来平坦化晶圆表面。硅片与抛光头之间有磨料并同时施加压力:表面材料与磨料发生化学反应生成一层相对容易去除的表面层,磨料中的研磨剂可较容易地将这一层的突出部分磨去,使晶圆表面达到全局性的平坦化。常见的抛光有氧化硅抛光、金属抛光等。
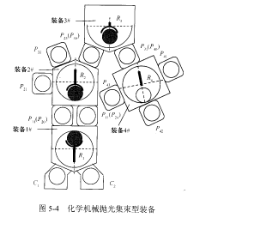
图5-4中的化学机械抛光设各由4个单集束型装备组成。装备l#和3#是运输(Transfcr)装备,只有两个单缓冲模块,没有加工模块,缓冲模块起中转传输作用l+l。在分解时,运输装备可被忽略掉,但要增加相邻缓冲模块等待时间,这类装备常见于12in半导体生产线上。因此,图5-4的化学机械抛光设备可被视为由装备2#和4#构成的两
集束型装备,将其分解为C2和C4两个单集束型装备,其C2的虚拟加工时间为夕23,C4的虚拟装载室投料时间为夕40。另外,在曰23和曰40上还要增加凡的搬运时间。起存储和传输晶圆作用,因此无须对R1进行调度。
硅片加工涉及多次薄膜的生长及去除过程,目的是形成具有一定功能的电路层。建立NE3210S01器件结构和多层连线会很自然地形成台阶,使硅片表面不平坦。芯片内电路层数越多,这种表面起伏越严重,这对后续的图形形成、芯片的成品率和长期可靠性有非常严重的影响,所以要对硅片进行平坦化(抛光)处理。⒛世纪qO年代以来,化学机械平坦化已成为最重要的平坦化技术。化学机械抛光是一种表面全局平坦化技术,它通过晶圆和一个抛光头之间的相对运动来平坦化晶圆表面。硅片与抛光头之间有磨料并同时施加压力:表面材料与磨料发生化学反应生成一层相对容易去除的表面层,磨料中的研磨剂可较容易地将这一层的突出部分磨去,使晶圆表面达到全局性的平坦化。常见的抛光有氧化硅抛光、金属抛光等。
图5-4中的化学机械抛光设各由4个单集束型装备组成。装备l#和3#是运输(Transfcr)装备,只有两个单缓冲模块,没有加工模块,缓冲模块起中转传输作用l+l。在分解时,运输装备可被忽略掉,但要增加相邻缓冲模块等待时间,这类装备常见于12in半导体生产线上。因此,图5-4的化学机械抛光设备可被视为由装备2#和4#构成的两
集束型装备,将其分解为C2和C4两个单集束型装备,其C2的虚拟加工时间为夕23,C4的虚拟装载室投料时间为夕40。另外,在曰23和曰40上还要增加凡的搬运时间。起存储和传输晶圆作用,因此无须对R1进行调度。
 相关技术资料
相关技术资料- 12-5化学机械抛光设备的仿真试验
热门点击
- 氮化硅湿法刻蚀
- 利用wafer map的颜色可以直观地表现所
- FIB的原理与SEM相似,
- 失去电子以后的施主杂质叫作电离施主
- Al CMP的方法及使用的研磨液
- 集成电路制造中的污染和清洗技术
- HcI寿命模型
- Beams2000型EMMI机台,拥有CDD
- 两个相互交织的线圈与传统的ICP源一起可以解
- 大分子离子注入(moIecuIar impI
推荐技术资料

- 循线机器人是机器人入门和
- 循线机器人是机器人入门和比赛最常用的控制方式,E48S... [详细]
 公网安备44030402000607
公网安备44030402000607





