
双臂集束型装备重入加工过程的仿真模型
发布时间:2017/11/29 21:52:26 访问次数:527
为有效控制重入加工中机械手的作业,定义一个外部变量刀(初始值为0),当晶圆移动至PM2或真空锁LLB前一步时,刀值自动加1,实现晶圆的流程控制。 K9F5608UOB-YCBO在模型中加入重置对象rcsct和初始化对象init,使系统自动删除所有对象的统计信息,并将PM氵中的加工时间通过幻表示。为缩短仿真过程,真空锁LLA遵循WafcrNum表格设定的计划,只生成3枚实体晶圆(MUs Entity)和3枚虚拟晶圆(MUs virtual),并进入仿真系统加工。
TablcFi⒗表格用来收集每枚晶圆完成加工时的仿真时间,以及每枚晶圆的加工周期。
Work Ⅱmc和Work Jate的功能是用来显示各加工模块和机械手的作业时间分布及设备的利用率,这样有利于对集束型装备进行性能分析。双臂集束型装备重入加工过程的仿真模型如图⒉12所示。
图⒉12 双臂集束型装备重入加工过程的仿真模型
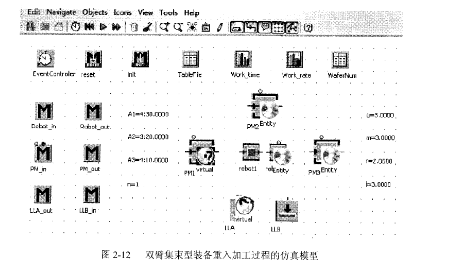
为有效控制重入加工中机械手的作业,定义一个外部变量刀(初始值为0),当晶圆移动至PM2或真空锁LLB前一步时,刀值自动加1,实现晶圆的流程控制。 K9F5608UOB-YCBO在模型中加入重置对象rcsct和初始化对象init,使系统自动删除所有对象的统计信息,并将PM氵中的加工时间通过幻表示。为缩短仿真过程,真空锁LLA遵循WafcrNum表格设定的计划,只生成3枚实体晶圆(MUs Entity)和3枚虚拟晶圆(MUs virtual),并进入仿真系统加工。
TablcFi⒗表格用来收集每枚晶圆完成加工时的仿真时间,以及每枚晶圆的加工周期。
Work Ⅱmc和Work Jate的功能是用来显示各加工模块和机械手的作业时间分布及设备的利用率,这样有利于对集束型装备进行性能分析。双臂集束型装备重入加工过程的仿真模型如图⒉12所示。
图⒉12 双臂集束型装备重入加工过程的仿真模型
上一篇:集束型装备仿真建模过程
上一篇:参数化界面设计
 相关技术资料
相关技术资料- 11-29双臂集束型装备重入加工过程的仿真模型

 公网安备44030402000607
公网安备44030402000607





