
集束型装备仿真建模过程
发布时间:2017/11/29 21:50:39 访问次数:477
Petri网模型可以描述一个离散事件系统的逻辑关系和动态行为,但集束型装备的运行控制与 K9F5608UOB-PCBO调度是现场工程技术人员负责的工作,Pc廿i网模型的资源和活动表述相对而言较为抽象,故针对集束型装各调度可行性,需要为工程技术人员提供易于理解、可视的图形化仿真平台。基于Pctri网模型和1晶圆周期调度,要实现集束型装备的仿真,不仅要将Petri网模型的各个事件在仿真模型中描述出来,而且要将初始暂态平稳地过渡到稳定状态。本节介绍本章参考文献[61]的仿真建模方法,即利用Plant Simul舶cln对具有重入加工的双臂集束型装各终止暂态进行建模和仿真。
模型框架
为实现系统仿真,以具有代表性的晶圆重入流程模式(1,(1,1)2)为例,即工序1由PM1加工,工序2(4)和工序3(5)分别由PM2、PM3加工,PM2和PM3为重入加工模块,重入次数佬=2。通过将仿真系统的构件与Pe“网模型中的资源和活动相对应,建立双臂集束型装备系统的仿真模型,具体过程如下。
设置对象及定义
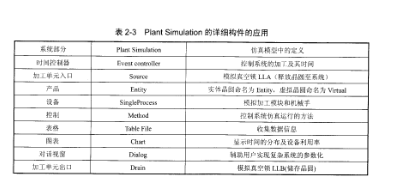
在仿真系统的框架中,利用物流对象singleProc模拟加工模块PM1~PM3和机械手(rob0tl趁),用单元入口sourGe和出口Drain分别模拟真空锁(输入输出装载室)LLA和LLB,晶圆用移动对象Entity表示。系统仿真模型中晶圆的加工流程和机械手搬运作业是通过运行Method中的相应程序来控制。Plant simulation的详细构件的应用如表⒉3所示。
Petri网模型可以描述一个离散事件系统的逻辑关系和动态行为,但集束型装备的运行控制与 K9F5608UOB-PCBO调度是现场工程技术人员负责的工作,Pc廿i网模型的资源和活动表述相对而言较为抽象,故针对集束型装各调度可行性,需要为工程技术人员提供易于理解、可视的图形化仿真平台。基于Pctri网模型和1晶圆周期调度,要实现集束型装备的仿真,不仅要将Petri网模型的各个事件在仿真模型中描述出来,而且要将初始暂态平稳地过渡到稳定状态。本节介绍本章参考文献[61]的仿真建模方法,即利用Plant Simul舶cln对具有重入加工的双臂集束型装各终止暂态进行建模和仿真。
模型框架
为实现系统仿真,以具有代表性的晶圆重入流程模式(1,(1,1)2)为例,即工序1由PM1加工,工序2(4)和工序3(5)分别由PM2、PM3加工,PM2和PM3为重入加工模块,重入次数佬=2。通过将仿真系统的构件与Pe“网模型中的资源和活动相对应,建立双臂集束型装备系统的仿真模型,具体过程如下。
设置对象及定义
在仿真系统的框架中,利用物流对象singleProc模拟加工模块PM1~PM3和机械手(rob0tl趁),用单元入口sourGe和出口Drain分别模拟真空锁(输入输出装载室)LLA和LLB,晶圆用移动对象Entity表示。系统仿真模型中晶圆的加工流程和机械手搬运作业是通过运行Method中的相应程序来控制。Plant simulation的详细构件的应用如表⒉3所示。
上一篇:预测和提高装备生产率的过程
 相关技术资料
相关技术资料- 11-29集束型装备仿真建模过程
热门点击
- 曝光能量宽裕度,归一化图像对数斜率(NILs
- 中频电压与直流电压比值大
- 退火过程中晶粒的变化
- 光刻胶配制原理
- 进行剂量补偿是刻蚀后检查(AEI)CDU改善
- 有机物、金属、颗粒的去除(SC1):
- 正向阻断峰值电压
- PODEM算法是由Goel等人提出的
- 光刻技术发展历史
- W plugR制程
推荐技术资料

- 业余条件下PCM2702
- PGM2702采用SSOP28封装,引脚小而密,EP3... [详细]
 公网安备44030402000607
公网安备44030402000607





