
���IJ�ͬ����ץ�����ȵļӹ�ʱ����һ���ӹ�ʱ�䴰
����ʱ��:2017/11/26 14:27:43 ���ʴ���:274
(1)���IJ�ͬ����ץ�����ȵļӹ�ʱ����һ���ӹ�ʱ�䴰��
(2)����Ƕ�ץ�����õ�,ץ����A915AY-680M�ܱ˴˿�Խ,���,���ȱ��뿼�DZ�����ײ�����ڼӹ�ʱ�䴰ʹ�õ��ȱ�ø�����,���Ի��������쵥Ԫ�ĵ����㷨����ֱ��Ӧ����ץ���������⡣
��Ȼץ�������뼯����װ���ĵ��Ⱥ�����,��ͬ�������Ƕ����ڼӹ�ʱ�䴰Լ��,һ�㶼�ӹ�ͬһ��Ʒ,���ڶ�ץ������е�ֵ�����֮��,��������װ�����ڲ��мӹ�������ӹ�����ʵ��,������װ�����ò���ģ����мӹ��ڰ뵼�����칤�����Ǻܳ��õ�,��ץ������һ�㲻���ڲ��мӹ�վ�����⡣����,���ڴ��ڲ���ģ��ļ�����װ���ĵ���,Ҳ��������ץ�����ȵ��㷨�����ڶ�ץ����������,����Ҫ���ǻ�е�ְ�����ҵ,����Ҫ���ǻ�е�ַ���������������Ż�����,���ڶ༯����װ����,��е�ַ���������ǹ̶���,����ģ�������ǹ̶���,��˶�ץ�����ȷ��������ʺ϶༯����װ����
(1)���IJ�ͬ����ץ�����ȵļӹ�ʱ����һ���ӹ�ʱ�䴰��
(2)����Ƕ�ץ�����õ�,ץ����A915AY-680M�ܱ˴˿�Խ,���,���ȱ��뿼�DZ�����ײ�����ڼӹ�ʱ�䴰ʹ�õ��ȱ�ø�����,���Ի��������쵥Ԫ�ĵ����㷨����ֱ��Ӧ����ץ���������⡣
��Ȼץ�������뼯����װ���ĵ��Ⱥ�����,��ͬ�������Ƕ����ڼӹ�ʱ�䴰Լ��,һ�㶼�ӹ�ͬһ��Ʒ,���ڶ�ץ������е�ֵ�����֮��,��������װ�����ڲ��мӹ�������ӹ�����ʵ��,������װ�����ò���ģ����мӹ��ڰ뵼�����칤�����Ǻܳ��õ�,��ץ������һ�㲻���ڲ��мӹ�վ�����⡣����,���ڴ��ڲ���ģ��ļ�����װ���ĵ���,Ҳ��������ץ�����ȵ��㷨�����ڶ�ץ����������,����Ҫ���ǻ�е�ְ�����ҵ,����Ҫ���ǻ�е�ַ���������������Ż�����,���ڶ༯����װ����,��е�ַ���������ǹ̶���,����ģ�������ǹ̶���,��˶�ץ�����ȷ��������ʺ϶༯����װ����
 ��ؼ�������
��ؼ�������- 11-26���IJ�ͬ����ץ�����ȵļӹ�ʱ����һ���ӹ�ʱ�䴰
- ���IC�ͺ�
- A915AY-680M
- ���������ͺ�
�������
- ��Բƫ�ⷨ�Ļ���ԭ��
- ����������ļ��ֵ��������
- ʪ����ϴ��̨�����ϴ���\��
- ��ѧ�ڽ�ЧӦ����
- ��������ע��
- ��ɢ�¼��ķ��淽����Ϊ��������
- ����ʪ����ʴ
- �����������������
- ȱ�ݨD�D����Ժ�ϵͳ��ȱ��
- ����ԭ�ӡ�������Ⱦ���ȥ��(SC2):
�Ƽ���������
- PCB����Ҫ��
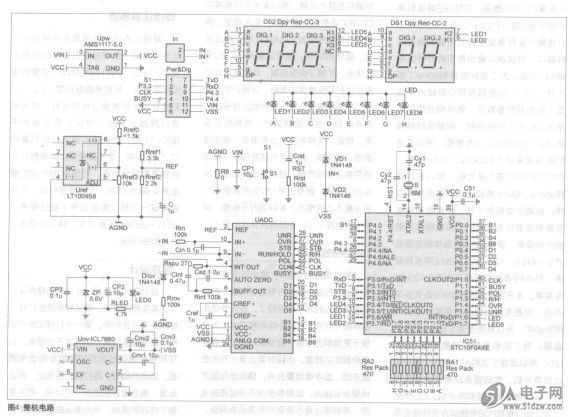
- ������·ͼ��ͼ4������·���á��������֮��Ϳ�ʼ���е�... [��ϸ]
 ��������44030402000607
��������44030402000607





