
带死区的数字PID算法
发布时间:2014/8/3 12:55:28 访问次数:2791
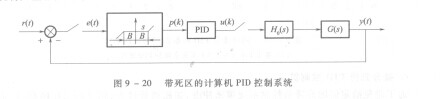
在许多实际的控制系统中,DAC7632VFT并不要求被控量十分精确地与设定值相等,而是容许偏差在一定范围内变化。在这种情况下,计算机控制中为了避免控制动作过于频繁,以消除由于执行机构或阀门的频繁动作所引起的系统振荡,有时采用所谓带死区的数字PID算法,也称带不灵敏区的算法。如图9 - 20所示,该算法是在原PID算法的前面增加一个不灵敏区的非线性环节来实现的.
s为死区增益,其数值可为O、0. 25、0.5、1等,图中只画出s=0时的水平直线。死区范围日是一个可调参数,其大小一般应根据控制系统对被控量稳态精度的要求以及现场的试验结果来确定。B值太小,使调节动作过子频繁,不能达到稳定被调对象的目的。如果日值取得太大,则系统将产生很大的滞后。当B=O或s=1时,则为普通的PID控制。
需要指出的是,死区是一个非线性环节,不能像线性环节一样随便移到PID控制器的后面,对控制量输出设定一个死区,这样做的效果是完全不同的。在生产现场有时为了延长执行机构或阀门使用寿命,有一种错误的做法,即不按设计规范的求片面地增大执行机构或阀门的不灵敏区,希望能避免执行机构或阀门频繁动作,这就相当于将死区移到了PID控制器后面,这样有时会适得其反。
在许多实际的控制系统中,DAC7632VFT并不要求被控量十分精确地与设定值相等,而是容许偏差在一定范围内变化。在这种情况下,计算机控制中为了避免控制动作过于频繁,以消除由于执行机构或阀门的频繁动作所引起的系统振荡,有时采用所谓带死区的数字PID算法,也称带不灵敏区的算法。如图9 - 20所示,该算法是在原PID算法的前面增加一个不灵敏区的非线性环节来实现的.
s为死区增益,其数值可为O、0. 25、0.5、1等,图中只画出s=0时的水平直线。死区范围日是一个可调参数,其大小一般应根据控制系统对被控量稳态精度的要求以及现场的试验结果来确定。B值太小,使调节动作过子频繁,不能达到稳定被调对象的目的。如果日值取得太大,则系统将产生很大的滞后。当B=O或s=1时,则为普通的PID控制。
需要指出的是,死区是一个非线性环节,不能像线性环节一样随便移到PID控制器的后面,对控制量输出设定一个死区,这样做的效果是完全不同的。在生产现场有时为了延长执行机构或阀门使用寿命,有一种错误的做法,即不按设计规范的求片面地增大执行机构或阀门的不灵敏区,希望能避免执行机构或阀门频繁动作,这就相当于将死区移到了PID控制器后面,这样有时会适得其反。
上一篇:抗积分饱和算法
上一篇:数字PID参数的整定
 相关技术资料
相关技术资料- 7-5失效机理
- 8-3带死区的数字PID算法
 公网安备44030402000607
公网安备44030402000607





