
再流焊后AOI
发布时间:2012/10/12 19:43:06 访问次数:896
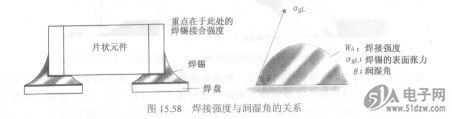
在该工位的AOI可用来检测出元器88E6097-A2-TAH1C000件焊接后的各种焊接缺陷(也包括贴片缺陷)。测试原理在于焊接强度WA与焊锡/元器件引脚之间润湿角臼存在着WA=U gL(l+cos0)的关系,也就是通过焊锡的浸润状态可以推断出焊锡的焊接强度,如图15.58所示。
摄像头拍摄下的图像由许多像素组成,并且每一个像素都有一定的灰度值(0~256),因此,通过一定数学模型进行图像信息处理可以精确地判定焊接质量。
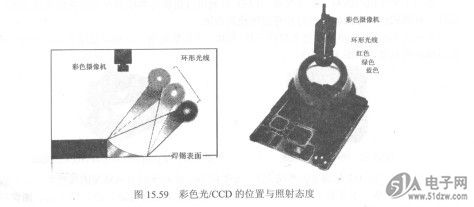
再流焊后AOI通常分为二维AOI和三维A01两种,其中二维AOI采用垂直摄像头并通过彩色高亮度方法实现对焊点质量的判别,典型的产品是欧姆龙VT-RBT-S,该机在工作时红色、绿色、蓝色三种环形光线能从不同的高度照射基板,彩色摄像机垂直安装在环形照明的中心线上,如图15.59所示。
当光线照射到焊锡表面上时,光线产生反射,红、绿、蓝三色光可分别从不同的角度照射到焊锡的表面,如图15.60所示。
由于红色光线比另两种颜色光线位于离基板面更远的位置(更高的位置),所以相对基板面入射角较大,如图15.61历示。照射到平坦焊锡表面的光线向正上方的摄像机方向反射,而照射到倾斜的焊锡表面的光线不向正上方反射。因此对于平坦的焊锡表面部分,摄像机拍摄到的是红色区域。
与红色光线的原理相同,绿色区域为摄像拍摄到的轻微倾斜的焊锡表面,而蓝色区域为摄像拍摄到的陡峭倾斜的焊锡表面。这样三维焊点外形就可以通过彩色亮度模式转化为二维的彩色图像,从而进一步通过图像处理并结合一定的数学模型以实现对焊点质量的检测。
在该工位的AOI可用来检测出元器88E6097-A2-TAH1C000件焊接后的各种焊接缺陷(也包括贴片缺陷)。测试原理在于焊接强度WA与焊锡/元器件引脚之间润湿角臼存在着WA=U gL(l+cos0)的关系,也就是通过焊锡的浸润状态可以推断出焊锡的焊接强度,如图15.58所示。
摄像头拍摄下的图像由许多像素组成,并且每一个像素都有一定的灰度值(0~256),因此,通过一定数学模型进行图像信息处理可以精确地判定焊接质量。
再流焊后AOI通常分为二维AOI和三维A01两种,其中二维AOI采用垂直摄像头并通过彩色高亮度方法实现对焊点质量的判别,典型的产品是欧姆龙VT-RBT-S,该机在工作时红色、绿色、蓝色三种环形光线能从不同的高度照射基板,彩色摄像机垂直安装在环形照明的中心线上,如图15.59所示。
当光线照射到焊锡表面上时,光线产生反射,红、绿、蓝三色光可分别从不同的角度照射到焊锡的表面,如图15.60所示。
由于红色光线比另两种颜色光线位于离基板面更远的位置(更高的位置),所以相对基板面入射角较大,如图15.61历示。照射到平坦焊锡表面的光线向正上方的摄像机方向反射,而照射到倾斜的焊锡表面的光线不向正上方反射。因此对于平坦的焊锡表面部分,摄像机拍摄到的是红色区域。
与红色光线的原理相同,绿色区域为摄像拍摄到的轻微倾斜的焊锡表面,而蓝色区域为摄像拍摄到的陡峭倾斜的焊锡表面。这样三维焊点外形就可以通过彩色亮度模式转化为二维的彩色图像,从而进一步通过图像处理并结合一定的数学模型以实现对焊点质量的检测。
 相关技术资料
相关技术资料- 10-12再流焊后AOI
热门点击
- 组合逻辑电路的设计与调试
- 电子产品装联场地的防静电接地
- 锡膏在再流炉中的熔化过程
- 模拟电子电路EWB仿真实验项目
- 三极管构成的开关电路
- 焊锡膏印刷过程
- 鼠笼式异步电动机的直接启动
- 测量误差的分类
- 贴片机技术参数的解析
- 焊点中有孔
推荐技术资料

- 循线机器人是机器人入门和
- 循线机器人是机器人入门和比赛最常用的控制方式,E48S... [详细]
 公网安备44030402000607
公网安备44030402000607





