
交流步进控制
发布时间:2012/6/9 14:55:59 访问次数:590
交流步进传动控制是根XC9572XL-10TQ100C据电动机的统一理论Te=CM FlF2=CM最F2 sin 6,以定转子磁动势间的夹角研乍为控制对象,通过保持定子电流幅值恒定获得大小不变的定子磁动势,控制sin8的大小就可实现电动机转矩的控制。为适应位置伺服系统,在实现过程中将定子电流由正弦波离散成阶梯波,使连续的圆旋转磁场转换为多边形磁场,获得离散转矩矢量,从而实现更有利于位置控制的介于矢量控制的连续电磁转矩和直接转矩的两点式电磁转矩控制之间的同步机步进控制。
步进控制理论
交流步进传动控制是基于计算机-IGBT模块――同步传动类电动机的传动控制模型,考虑到系统离散性本质,为解决同步机位置伺服控制问题而提出的一种运动控制理论。
同步机的矩角特
当同步电动机定子绕组通以三相对称电流时,有
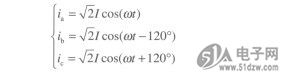
交流步进传动控制是根XC9572XL-10TQ100C据电动机的统一理论Te=CM FlF2=CM最F2 sin 6,以定转子磁动势间的夹角研乍为控制对象,通过保持定子电流幅值恒定获得大小不变的定子磁动势,控制sin8的大小就可实现电动机转矩的控制。为适应位置伺服系统,在实现过程中将定子电流由正弦波离散成阶梯波,使连续的圆旋转磁场转换为多边形磁场,获得离散转矩矢量,从而实现更有利于位置控制的介于矢量控制的连续电磁转矩和直接转矩的两点式电磁转矩控制之间的同步机步进控制。
步进控制理论
交流步进传动控制是基于计算机-IGBT模块――同步传动类电动机的传动控制模型,考虑到系统离散性本质,为解决同步机位置伺服控制问题而提出的一种运动控制理论。
同步机的矩角特
当同步电动机定子绕组通以三相对称电流时,有
上一篇:开关磁阻电动机的应用
上一篇:交流步进控制与定位矢量的关系


 公网安备44030402000607
公网安备44030402000607





