
事件的触发与机械手的控制
发布时间:2017/11/29 21:59:05 访问次数:543
Pla11t⒏mul缸on的对象包括属性和事件,属性是指对象的特性,事件是指系统的状态在满足触发条件下发生的变化。对于一般的生产流程来说,通过Plant Simul肘ion中传统的连线方式便可使仿真系统自动实现物料的流动,K9F5608UOC-YCBO但该方式不能现复杂且多样化的晶圆加工流程。原因在于集束型装备加工系统是可重构的,其晶圆流向并非固定,有些需要重入加工。因此,在模型中要通过开发Mcthod对象来满足事件的触发,实现控制仿真模型的运行和状态变化,从而控制仿真模型的运行和状态变化。
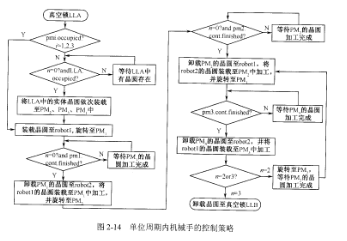
机械手的作业通过触发晶圆出入机械手的Mcthod来控制,每一个Mcthod内封装符合晶圆加工工艺的控制程序。其中,方法LLA out和LLB in分别控制机械手在真空锁中卸载和装载晶圆;PM_in和PMput分别判断晶圆出入加工模块PM氵的时间;RoboLin和Robot ouf贝刂分别实现机械手何时抓取晶圆,并把手中的晶圆按工艺要求装载到对应的加工模块中加工。为使初始状态迅速过渡到稳态,假定初始状态的系统开始运行时,变量刀的值为0,3枚实体晶圆Ent”依次进入PM2、PM3、PM”这样便形成虚拟稳态。然后,基于1晶圆周期调度的终止暂态加工过程,单位周期内机械手的控制策略如图⒉14所示。
Pla11t⒏mul缸on的对象包括属性和事件,属性是指对象的特性,事件是指系统的状态在满足触发条件下发生的变化。对于一般的生产流程来说,通过Plant Simul肘ion中传统的连线方式便可使仿真系统自动实现物料的流动,K9F5608UOC-YCBO但该方式不能现复杂且多样化的晶圆加工流程。原因在于集束型装备加工系统是可重构的,其晶圆流向并非固定,有些需要重入加工。因此,在模型中要通过开发Mcthod对象来满足事件的触发,实现控制仿真模型的运行和状态变化,从而控制仿真模型的运行和状态变化。
机械手的作业通过触发晶圆出入机械手的Mcthod来控制,每一个Mcthod内封装符合晶圆加工工艺的控制程序。其中,方法LLA out和LLB in分别控制机械手在真空锁中卸载和装载晶圆;PM_in和PMput分别判断晶圆出入加工模块PM氵的时间;RoboLin和Robot ouf贝刂分别实现机械手何时抓取晶圆,并把手中的晶圆按工艺要求装载到对应的加工模块中加工。为使初始状态迅速过渡到稳态,假定初始状态的系统开始运行时,变量刀的值为0,3枚实体晶圆Ent”依次进入PM2、PM3、PM”这样便形成虚拟稳态。然后,基于1晶圆周期调度的终止暂态加工过程,单位周期内机械手的控制策略如图⒉14所示。
上一篇:参数化界面设计
 相关技术资料
相关技术资料- 11-29事件的触发与机械手的控制

 公网安备44030402000607
公网安备44030402000607





