

PID VI简介
发布时间:2014/7/1 21:06:00 访问次数:1037
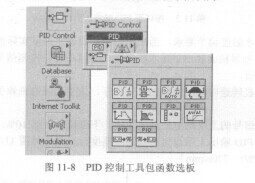
PID Control函数子选板在函数选板的“附加工具包”项下,如图11-8所示。PID函数子选板中共有10个VI,按照从左到右、从上到下的顺序依次为:
(1) PID VI(简单PID VI)。 QS3253QX简单PID VI的算法适用于简单的PID应用或需要高效率算法的高速控制应用。
(2) PID Advanced VI(高级PID VI)。高级PID VI的算法带有一些高级选项,可以实现PID控制与手动控制之间平滑过渡、非线性积分动作、不同程度的自由控制和误差调整控制等。
( 3) PID with Autotuning VI(自调节VI)。自调节向导。用这个VI可以代替简单PID VI,置自调节参教。自调节VI在基本PID算法的基础上增加了它比简单PID VI增加的输入和输出用来设
(4) PID Lead-Lag VI(PID超前一滞后VI)。PID超前一滞后VI通常作为前馈控制的动态补偿器。这个VI使用的算法是位置PID算法,是实指数超前一滞后的近似值。
( 5) PID Setpoint Profile VI(PID设定点剖析VI)。PID设定点剖析VI为“斜率7保持”类型的控制应用生成控制循环中设定点值的时间序列。
( 6) PID Controllnput Filter VI(PID控制输入滤波器VI)。PID控制输入滤波器VI对输入值应用5阶低通有限脉冲响应滤波器。滤波器截止频率设计为采样率1/10。
( 7) PID Gain Schedule VI(PID增益计划表VI)。PID增益计划表VI从增益计划表中为过程控制选择一组PID增益值,这个受控过程在不同阶段需要不同的增益值(例如高度非线性系统)。
(8) PID Output Rate Limiter VI(PID输出比率限制器VI)。PID输出比率限制器VI用于设定控制器输出的最大变化率,这个VI在应用中通常紧邻PID VI放在它后面。
PID Control函数子选板在函数选板的“附加工具包”项下,如图11-8所示。PID函数子选板中共有10个VI,按照从左到右、从上到下的顺序依次为:
(1) PID VI(简单PID VI)。 QS3253QX简单PID VI的算法适用于简单的PID应用或需要高效率算法的高速控制应用。
(2) PID Advanced VI(高级PID VI)。高级PID VI的算法带有一些高级选项,可以实现PID控制与手动控制之间平滑过渡、非线性积分动作、不同程度的自由控制和误差调整控制等。
( 3) PID with Autotuning VI(自调节VI)。自调节向导。用这个VI可以代替简单PID VI,置自调节参教。自调节VI在基本PID算法的基础上增加了它比简单PID VI增加的输入和输出用来设
(4) PID Lead-Lag VI(PID超前一滞后VI)。PID超前一滞后VI通常作为前馈控制的动态补偿器。这个VI使用的算法是位置PID算法,是实指数超前一滞后的近似值。
( 5) PID Setpoint Profile VI(PID设定点剖析VI)。PID设定点剖析VI为“斜率7保持”类型的控制应用生成控制循环中设定点值的时间序列。
( 6) PID Controllnput Filter VI(PID控制输入滤波器VI)。PID控制输入滤波器VI对输入值应用5阶低通有限脉冲响应滤波器。滤波器截止频率设计为采样率1/10。
( 7) PID Gain Schedule VI(PID增益计划表VI)。PID增益计划表VI从增益计划表中为过程控制选择一组PID增益值,这个受控过程在不同阶段需要不同的增益值(例如高度非线性系统)。
(8) PID Output Rate Limiter VI(PID输出比率限制器VI)。PID输出比率限制器VI用于设定控制器输出的最大变化率,这个VI在应用中通常紧邻PID VI放在它后面。
上一篇:软件结构
上一篇:PID VI应用范例
 相关技术资料
相关技术资料- 7-1PID VI简介
热门点击
- 变量主要由两个部分构成
- LabVIEW实现多线程的方法
- 汉字交换码
- 时基选择( TIME/DIV)和微调
- 溢流阀动态特性测试
- 变址寻址
- 用指针式万用表检测电感器的方法
- 补码
- 倒装芯片的组装工艺流程
- CH1通道信号输入插座(INPUT)
推荐技术资料
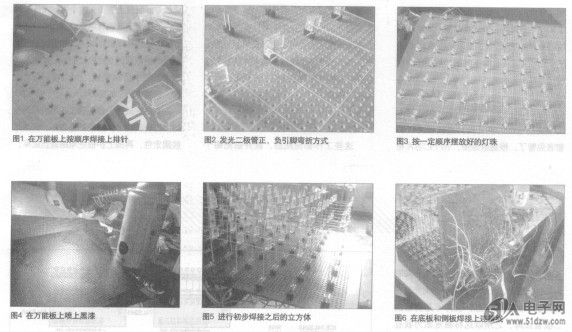
- 单片机版光立方的制作
- N视频: http://v.youku.comN_sh... [详细]
 公网安备44030402000607
公网安备44030402000607





