
直流电动机PWM调压调速的数字PID控制实现
发布时间:2011/10/8 10:41:40 访问次数:4620
(一)总体设计 HBS050ZH-ANT
基本的设计思路是运用PID调节器,实现直流电动机在带动负载的情况下也能稳定地运行。运用A/D转换芯片将滑动变阻器的模拟电压转换为数字量作为控制直流电动机速度的给定值;用压控振荡器模拟直流电动机的运行(电压高一转速高一脉冲多),单片机在单位时间内对脉冲计数作为电动机速度的检测值;应用数字PID模型作单片机控制编程,其中P、I、D参数可按键输入并用LED教码显示;单片机PWM调宽输出作为输出值,开关驱动、电子滤波控制模拟电动机(压控振荡器)实现对直流电动机的PID调压调速功能。
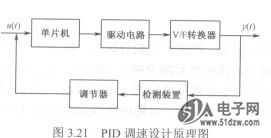
该控制系统是一个闭环系统,借助单片机来控制A/D芯片将模拟电压转换成数字电压,A/D给定的电压越大,则产生的数字量越大,单片机再控制这个数字量产生一个PWM。PWM占空比越大,驱动晶体管导通的时间越长,这样加到压频转换器的电压也就越大。电压越大,则压频转换器在单位时间输出的计数脉冲也就越多,相当于电动机的电压越大,其转速也就会越快。再用单片机对压频转换器的输出脉冲计数,PID调节器就把这个计数脉冲和预先设定的值进行比较,若比设定值小,则得到一个正偏差,将偏差加到A/D的给定电压,相当于加大了PWM的占空比;要是比设定值大,则会得到一个负偏差,就把这个偏差与给定的电压相减,减小PWM的占空比,通过改变占空比来改变晶体管的导通时间,就可以改变压频转换器的输入电压,也就改变了压频转换器的单位计数脉冲,从而达到调节电动机速度的目的。
(二) PWM调制
A/D芯片给定一定的电压,用单片机控制来产生一个PWM,给定的电压不同,就会得到不同的PWM波形。设计中选用ADC0808和AT89C51来实现。
产生PWM波后,就可以借助PWM脉冲来控制晶体管的导通和关断,给压频转换器提供一定的电压,利用Protues进行仿真,给定一个+12V的电压,通过晶体管的导通和关断来给压频转换器供电,压频转换器就会输出很多的脉冲,借助单片机P3.5来计数,其计数送给PO显示。通过给定不同的A/D的输入电压,就可以得到不同的计数显示,电压越大,其计数显示也就越大,改变计数脉冲的周期和硬件压频转换器(LM331)的电阻和电容,就可以得到与输入电压接近的数值显示,得到一个很理想的开环系统,为闭环PWM调节做好准备。
当开环系统稳定后,加上一个扰动,或者说是加上负载,就使得压频转换器的电压减小,给定一定电压,在负载分压情况下,相当于直流电动机的电压会减小,其转速就会下降;或者说当有负载时,压频转换器的输入电压就会减小,输人的脉冲在单位时间就会减少。设计PID调节器,通过改变PID的参数,来改变原来的PWM的占空比,使得晶体管的导通时间加长或减少,这样就改变了直流电动机的输入电压,即在Protues压频转换器的输入电压,使得输出的计数脉冲在单位时间发生改变,从而模拟了直流电动机的转速的改变。由于偏差的存在,使得PID调节器不断地去修正,形成闭环调节系统,使得结果无限接近所预期的设定值。
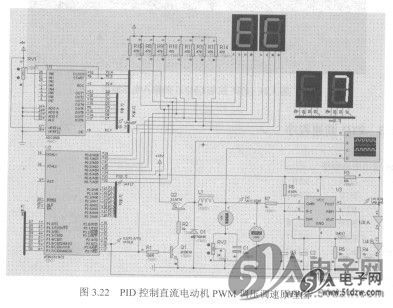
基于单片机的数字PID控制直流电动机PWM调压调速原理如图3.22所示。
(一)总体设计 HBS050ZH-ANT
基本的设计思路是运用PID调节器,实现直流电动机在带动负载的情况下也能稳定地运行。运用A/D转换芯片将滑动变阻器的模拟电压转换为数字量作为控制直流电动机速度的给定值;用压控振荡器模拟直流电动机的运行(电压高一转速高一脉冲多),单片机在单位时间内对脉冲计数作为电动机速度的检测值;应用数字PID模型作单片机控制编程,其中P、I、D参数可按键输入并用LED教码显示;单片机PWM调宽输出作为输出值,开关驱动、电子滤波控制模拟电动机(压控振荡器)实现对直流电动机的PID调压调速功能。
该控制系统是一个闭环系统,借助单片机来控制A/D芯片将模拟电压转换成数字电压,A/D给定的电压越大,则产生的数字量越大,单片机再控制这个数字量产生一个PWM。PWM占空比越大,驱动晶体管导通的时间越长,这样加到压频转换器的电压也就越大。电压越大,则压频转换器在单位时间输出的计数脉冲也就越多,相当于电动机的电压越大,其转速也就会越快。再用单片机对压频转换器的输出脉冲计数,PID调节器就把这个计数脉冲和预先设定的值进行比较,若比设定值小,则得到一个正偏差,将偏差加到A/D的给定电压,相当于加大了PWM的占空比;要是比设定值大,则会得到一个负偏差,就把这个偏差与给定的电压相减,减小PWM的占空比,通过改变占空比来改变晶体管的导通时间,就可以改变压频转换器的输入电压,也就改变了压频转换器的单位计数脉冲,从而达到调节电动机速度的目的。
(二) PWM调制
A/D芯片给定一定的电压,用单片机控制来产生一个PWM,给定的电压不同,就会得到不同的PWM波形。设计中选用ADC0808和AT89C51来实现。
产生PWM波后,就可以借助PWM脉冲来控制晶体管的导通和关断,给压频转换器提供一定的电压,利用Protues进行仿真,给定一个+12V的电压,通过晶体管的导通和关断来给压频转换器供电,压频转换器就会输出很多的脉冲,借助单片机P3.5来计数,其计数送给PO显示。通过给定不同的A/D的输入电压,就可以得到不同的计数显示,电压越大,其计数显示也就越大,改变计数脉冲的周期和硬件压频转换器(LM331)的电阻和电容,就可以得到与输入电压接近的数值显示,得到一个很理想的开环系统,为闭环PWM调节做好准备。
当开环系统稳定后,加上一个扰动,或者说是加上负载,就使得压频转换器的电压减小,给定一定电压,在负载分压情况下,相当于直流电动机的电压会减小,其转速就会下降;或者说当有负载时,压频转换器的输入电压就会减小,输人的脉冲在单位时间就会减少。设计PID调节器,通过改变PID的参数,来改变原来的PWM的占空比,使得晶体管的导通时间加长或减少,这样就改变了直流电动机的输入电压,即在Protues压频转换器的输入电压,使得输出的计数脉冲在单位时间发生改变,从而模拟了直流电动机的转速的改变。由于偏差的存在,使得PID调节器不断地去修正,形成闭环调节系统,使得结果无限接近所预期的设定值。
基于单片机的数字PID控制直流电动机PWM调压调速原理如图3.22所示。
上一篇:PID参数整定方法
上一篇:Multisim对元器件的管理
 相关技术资料
相关技术资料- 12-12电热水器控制电路
- 10-8直流电动机PWM调压调速的数字PID控制实现

 公网安备44030402000607
公网安备44030402000607





