
PID参数整定方法
发布时间:2011/10/8 10:24:11 访问次数:7254
PID控制器参数整定的方法很多,概括起来有两大类: I048C030T021P2
一是理论计算整定法。它主要依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。
二是工程整定方法,它主要依赖工程经验,直接在控制系统的试验中进行,该方法简单,易于掌握,在工程实际中被广泛采用。PID控制器参数的工程整定方法,主要有临界比例法、响应曲线法和衰减法。三种方法各有特点,其共同点都是通过试验,然后按照工程经验公式对控制器参数进行整定。但无论采用哪一种方法,所得到的控制器参数都需要在实际运行中进行最后调整写完善。现在一般采用的是临界比例法。
1.扩充临界比例法
扩充临界比例法适用于有自平衡特性的被控对象,比例(度)δ比例系数Kp成倒数关系。整定数字调节器参数的步骤如下。
①选择采样周期为被控对象纯滞后时间的十分之一以下。
②去掉积分作用和微分作用,逐渐增大比例度系数KP直至系统对阶跃输入的响应达到临界振荡状态(稳定边缘),记下此时的临界比例系数δ及系统的临界振荡周期TK。
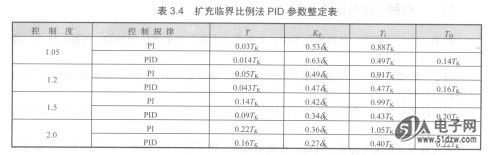
③选择控制度。

通常,当控制度为1.05时,就可以认为DDC与模拟控制效果相当。
④根据选定的控制度,查表3.4求得T、KP、T1、TD的值。
2.扩充响应曲线法
扩充响应曲线法适用于多容量自平衡系统,参数整定步骤如下。
①让系统处于手动操作状态,将被调量调节到给定值附近,并使之稳定下来,然后突然改变给定值,给对象一个阶跃输入信号。
②用记录仪表记录被调量在阶跃输入下的整个变化过程曲线,如图3.20所示。
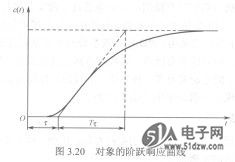
③在曲线最大斜率处作切线,求得滞后时间τ被控对象时间常数Tτ以及它们的比值Tτ/T
④由求得的τ正及Tτ及τ查表3.5,即可求得数字调节器的有关参数KP、TI、TD及采样周期T。
PID控制器参数整定的方法很多,概括起来有两大类: I048C030T021P2
一是理论计算整定法。它主要依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。
二是工程整定方法,它主要依赖工程经验,直接在控制系统的试验中进行,该方法简单,易于掌握,在工程实际中被广泛采用。PID控制器参数的工程整定方法,主要有临界比例法、响应曲线法和衰减法。三种方法各有特点,其共同点都是通过试验,然后按照工程经验公式对控制器参数进行整定。但无论采用哪一种方法,所得到的控制器参数都需要在实际运行中进行最后调整写完善。现在一般采用的是临界比例法。
1.扩充临界比例法
扩充临界比例法适用于有自平衡特性的被控对象,比例(度)δ比例系数Kp成倒数关系。整定数字调节器参数的步骤如下。
①选择采样周期为被控对象纯滞后时间的十分之一以下。
②去掉积分作用和微分作用,逐渐增大比例度系数KP直至系统对阶跃输入的响应达到临界振荡状态(稳定边缘),记下此时的临界比例系数δ及系统的临界振荡周期TK。
③选择控制度。
通常,当控制度为1.05时,就可以认为DDC与模拟控制效果相当。
④根据选定的控制度,查表3.4求得T、KP、T1、TD的值。
2.扩充响应曲线法
扩充响应曲线法适用于多容量自平衡系统,参数整定步骤如下。
①让系统处于手动操作状态,将被调量调节到给定值附近,并使之稳定下来,然后突然改变给定值,给对象一个阶跃输入信号。
②用记录仪表记录被调量在阶跃输入下的整个变化过程曲线,如图3.20所示。
③在曲线最大斜率处作切线,求得滞后时间τ被控对象时间常数Tτ以及它们的比值Tτ/T
④由求得的τ正及Tτ及τ查表3.5,即可求得数字调节器的有关参数KP、TI、TD及采样周期T。
上一篇:采样周期的选择
 相关技术资料
相关技术资料- 10-8PID参数整定方法
- 相关IC型号
- I048C030T021P2
- 暂无最新型号
热门点击

 公网安备44030402000607
公网安备44030402000607





