
产品尺寸和端点尺寸的精度控制少数极采用60°相带
发布时间:2022/4/2 13:26:07 访问次数:1152
alpha、beta、λ常用来表示软件测试过程中的三个阶段, alpha是第一阶段,一般只供内部测试使用;
beta是第二个阶段,已经消除了软件中大部分的不完善之处,
但仍有可能还存在缺陷和漏洞,一般只提供给特定的用户群来测试使用;
除了材质的设计外,国巨在产品尺寸和端点尺寸的精度控制也付出相当多的研发心力,01005系列MLCC所采用的是新型端点技术,除了提升产品的可靠度以外,也使得客户端的打件更有效率。
这种调速基本上属于恒转矩调速,适用于起重机、运输带等机械。
λ是第三个阶段,此时产品已经相当成熟,只需在个别地方再做进一步的优化处理.
N32G455、N32G435和N32L4x系列等多款MCU凭借高性能、高频、高速等优势,适用于移动机器人的激光导航模块,也可用作各类移动机器人主控芯片,现已成功应用于多家行业标杆客户的扫地机器人和送餐服务机器人产品中。
直流电机的电枢电动势 当电枢旋转时,电枢绕组切割磁力线而产生感应电动势。
丫Y/Y形联结二相2/4极24槽Y丫/Y形联结双速电动机线圈及出线端接法,实线箭头表示二极时的电流方向,虚线箭头表示四极时的电流方向。
在倍极双速电动机中,由于少数极采用60°相带,出线端互差120°电角度。改为倍极时,变为120°相带,出线端互差240°电角度,造成低速时相序反转,因此应将两个出线端头对调以保证转向一致。这就是如图9 62和图9-63中所示4Ⅴ与4W调换位置的缘故。
alpha、beta、λ常用来表示软件测试过程中的三个阶段, alpha是第一阶段,一般只供内部测试使用;
beta是第二个阶段,已经消除了软件中大部分的不完善之处,
但仍有可能还存在缺陷和漏洞,一般只提供给特定的用户群来测试使用;
除了材质的设计外,国巨在产品尺寸和端点尺寸的精度控制也付出相当多的研发心力,01005系列MLCC所采用的是新型端点技术,除了提升产品的可靠度以外,也使得客户端的打件更有效率。
这种调速基本上属于恒转矩调速,适用于起重机、运输带等机械。
λ是第三个阶段,此时产品已经相当成熟,只需在个别地方再做进一步的优化处理.
N32G455、N32G435和N32L4x系列等多款MCU凭借高性能、高频、高速等优势,适用于移动机器人的激光导航模块,也可用作各类移动机器人主控芯片,现已成功应用于多家行业标杆客户的扫地机器人和送餐服务机器人产品中。
直流电机的电枢电动势 当电枢旋转时,电枢绕组切割磁力线而产生感应电动势。
丫Y/Y形联结二相2/4极24槽Y丫/Y形联结双速电动机线圈及出线端接法,实线箭头表示二极时的电流方向,虚线箭头表示四极时的电流方向。
在倍极双速电动机中,由于少数极采用60°相带,出线端互差120°电角度。改为倍极时,变为120°相带,出线端互差240°电角度,造成低速时相序反转,因此应将两个出线端头对调以保证转向一致。这就是如图9 62和图9-63中所示4Ⅴ与4W调换位置的缘故。
 相关技术资料
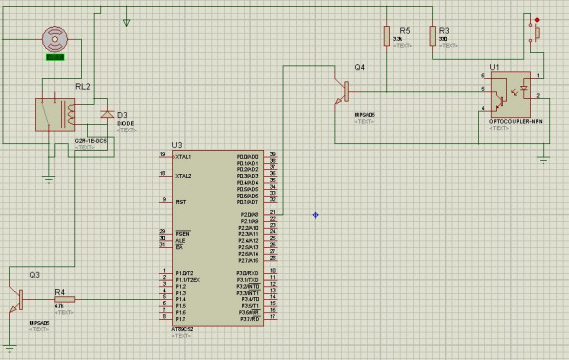
相关技术资料- 7-12PWM输入功率驱动器工作原理
- 7-12隔离式 DC/DC 变换器和模块优势特征
- 7-12解读集成4 个高效降压 DC/DC 变换器
- 7-12数字隔离功能全集成 DC/DC 电源变换器简述
- 7-12集成低噪声电流输入模数转换器 (ADC)应用详解
- 7-12128 通道20 位电流数字转换器应用探究
- 7-11最新12kW量产电源参考设计简述
- 7-11第三代快速碳化硅MOSFET技术参数应用
- 7-11800 V高压直流 (HVDC)全新架构电源系统
- 7-11串行千兆位媒体独立接口(SGMII和RGMII)
- 7-11Analog Devices ADIN3310应用详情
- 7-11干簧传感器MK17系列应用详解

 公网安备44030402000607
公网安备44030402000607





