
两路电机控制的使能引脚EN12和EN34对显卡没有要求
发布时间:2022/3/14 18:32:12 访问次数:401
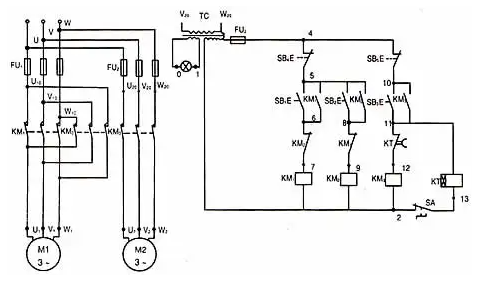
机器人有三个车轮,两个使用电机控制,另一个万向轮,因此使用1片L293D进行控制即可。
将两路PMW控制信号分别接至两路电机控制的使能引脚EN12和EN34,通过调整PWM的占空比可以调整电机的转速。
将电机正反转控制线分别接入IN1、IN2、IN3和IN4,通过写入不同的值控制两个电机的正转和反转。
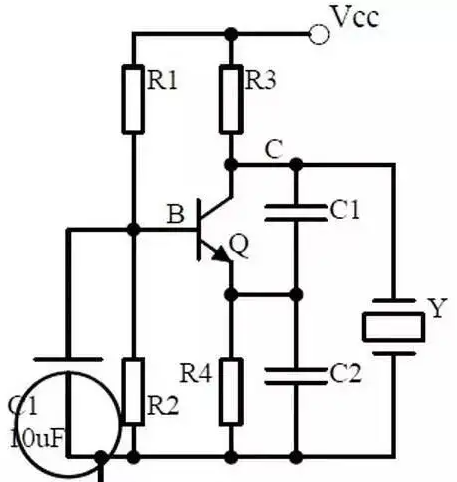
ISD25120的录放时间为120秒,录音最多能分600段。只要在分段录/放音操作前(不少于300纳秒),给地址A0"A9赋值,录音及放音功能均从设定的起始地址开始。
不过与DLSS技术不同,FSR 2.0的本质是一种超采样技术,因此它并不需要专门的AI进行加速,对显卡也没有要求。
这意味着,理论上讲,FSR 2.0将不是AMD显卡独占,而是能够适配市面上的所有显卡。
根据目前的消息,AMD计划在两周后的2022年游戏开发者大会(GDC)上展示一种新的游戏图像缩放技术.
通过最小值选择作为当前燃料行程基准:燃料分配基准则根据燃烧基准温度辅以其他逻辑条件判断燃气轮机所处燃烧模式,并根据不同的燃烧模式得出一级燃料阀在燃料行程基准中所占的比例值,剩余的燃料行程基准值由二级燃料阀与切换燃料阀根据需要再次分配。
各燃料阀的分配比例:燃料流量基准是由燃料行程基准及燃料分配比例计算得到的分配流量以及由压气机排气压力和燃料温度计算得到的预充流量相加得到。
机器人有三个车轮,两个使用电机控制,另一个万向轮,因此使用1片L293D进行控制即可。
将两路PMW控制信号分别接至两路电机控制的使能引脚EN12和EN34,通过调整PWM的占空比可以调整电机的转速。
将电机正反转控制线分别接入IN1、IN2、IN3和IN4,通过写入不同的值控制两个电机的正转和反转。
ISD25120的录放时间为120秒,录音最多能分600段。只要在分段录/放音操作前(不少于300纳秒),给地址A0"A9赋值,录音及放音功能均从设定的起始地址开始。
不过与DLSS技术不同,FSR 2.0的本质是一种超采样技术,因此它并不需要专门的AI进行加速,对显卡也没有要求。
这意味着,理论上讲,FSR 2.0将不是AMD显卡独占,而是能够适配市面上的所有显卡。
根据目前的消息,AMD计划在两周后的2022年游戏开发者大会(GDC)上展示一种新的游戏图像缩放技术.
通过最小值选择作为当前燃料行程基准:燃料分配基准则根据燃烧基准温度辅以其他逻辑条件判断燃气轮机所处燃烧模式,并根据不同的燃烧模式得出一级燃料阀在燃料行程基准中所占的比例值,剩余的燃料行程基准值由二级燃料阀与切换燃料阀根据需要再次分配。
各燃料阀的分配比例:燃料流量基准是由燃料行程基准及燃料分配比例计算得到的分配流量以及由压气机排气压力和燃料温度计算得到的预充流量相加得到。
 相关技术资料
相关技术资料- 7-7AMOLED显示驱动芯片关键技术及应用
- 7-7CMOS图像传感器技术参数设计
- 7-7GB300 超级芯片应用需求分析
- 7-74NP 工艺NVIDIA Blackwell 架构 GPU
- 7-7GB300 芯片、NVL72 系统和液冷技术探究
- 7-7首个最新高端芯片人工智能服务器系统
- 7-5CV/CC InnoSwitch3-AQ 开关电源 IC
- 7-5URF1DxxM-60WR3系列应用前景分析
- 7-51-6W URA24xxN-xxWR3G系列优势特征
- 7-5闭环磁通门信号调节芯片NSDRV401
- 7-5SK-RiSC-SOM-H27X-V1.1应用探究
- 7-5RISC技术8位微控制器参数设计

 公网安备44030402000607
公网安备44030402000607





