
SUP75P03-08 转向及转速的大小影响齿轮的转速
发布时间:2020/2/12 20:28:24 访问次数:1515
SUP75P03-08考虑到z4=z7 (3-6)
由该式即可看出,恒装的输出转速取决于恒装的输人转速和液压马达的输出转速。式中,o1为自变量,不能人为改变,而刀12可以根据l1的大小自动调整,从而使输出转速j9保持不变。
恒速传动装置的三种工作状态,下面以一台4对极电机为例,说明恒装的三种工作状态。该发电机的额定转速应为60r-mN=60×400=6000r/nlin (3-7)
为了保持发电机转速为6000r/min,根据发动机转速的高低,恒装有三种工作状态。
为了便于分析,下面以某型飞机所采用的恒装为例,列出恒装中差动游星齿轮系各齿轮的齿数,如表3-1所示。该型号恒装的输入轴转速变化范围为4300~8600r/min。

表3-1 恒装中差动游星齿轮系各齿轮的齿数
动点转速时,当液压马达不转动即u12=0时,发机通过差动齿轮系传动发电机,是单纯的机械传动,此时为保持发电机转速为额定值所需要的恒装输人轴转速u1z称为制动点转速,其大小可从式(3-6)求得:
2Z=z9z2 (3-8)
uN为发电机额定转速。恒装的这种工作状态称为零差动工作方式。将表格中的齿数代入,可求得甩1z≈5719r/min。
恒装输少逍由查勤芨低王制动点转速时工在这种情况下,若单靠差动齿轮系的机械传动,发电机的转速必低于额定转速。因此,必须由液压马达的转速来补偿,即液压马达输出齿轮Z12应顺时针方向转动,使输人环形齿轮Z3逆时针方向旋转,促使第一组游星齿轮Z5转速加快,从而使恒装输出轴转速加大。
这一关系从式(3-6)也可以看出,此时L12应取负值,即液压马达输出齿轮Z12转向应与恒装输人齿轮zL转向相反。这种工作方式称为正差动工作方式(见图3-3)。将齿数代人式(3-6),可求得恒装输人轴转速最低(4300r/min)时,液压马达的转速为:输入环形齿轮,输出齿轮至泵及调速器至发动机,液压马达输出齿轮zI2输入齿轮.
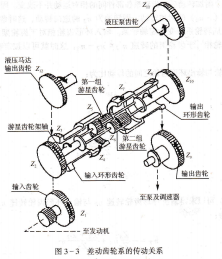
图3-3 差动齿轮系的传动关系
设输人齿轮z1由发动机带动反时针方向旋转,它带动游星齿轮架z2及z10顺时针方向转动。游星齿轮架z10一方面带动液压泵齿轮Z11旋转,同时带动装在齿轮架上的两组游星齿轮z5和z6公转。第一组游星齿轮Z5与输人环形齿轮Z4内啮合。假设液压马达输出齿轮z12不转动,则与z12外啮合的输人环形齿轮也不动,这就迫使这一组游星齿轮逆时针方向自转,并带动与之外啮合的第二组游星齿轮z6顺时针方向自转。第二组游星齿轮又与输出环形齿轮z7内啮合,所以带动输出环形齿轮顺时针方向旋转,并使与输出环形齿轮Z:外啮合的输出齿轮z9逆时针方向转动。可见,恒装的输入齿轮z1与输出齿轮z9转向相同。各齿轮的旋转方向如图3-3所示。
当液压马达旋转时,其转向及转速的大小都会影响输出齿轮的转速。如液压马达输出齿轮Z12顺时针方向转动时,会带动输人环形齿轮z3逆时针方向转动,从而使原来就逆时针方向自转的第一组游星齿轮z5的转速加快,那么输出齿轮的转速也将加快。这种情况如同在原转速上“叠加”了一个同方向的转速,即液压马达转速起正的补偿作用。各齿轮转向仍如图3-3所示。
反之,当液压马达齿轮z12逆时针方向旋转时,带动输入环形齿轮z3顺时针转动,这就使得原来逆时针方向自转的第一组游星齿轮Z5转速变慢,从而使输出齿轮z9的转速也变慢。即如同在原转速方向上“叠加”了一个反方向的转速,液压马达起负的补偿作用。下面按相对运动原理求差动齿轮系的传动比。设U1、U2`U3(=U4)、U5、U6、U7(=72J)、U9分别是相应齿轮Z1、z2、z3、Z5、Z6、z7、z9的绝对转速,其中转向相反的齿轮其转速符号也相反,即一个为正,一个为负。按相对运动原理可知,当给游星齿轮系的.
SUP75P03-08考虑到z4=z7 (3-6)
由该式即可看出,恒装的输出转速取决于恒装的输人转速和液压马达的输出转速。式中,o1为自变量,不能人为改变,而刀12可以根据l1的大小自动调整,从而使输出转速j9保持不变。
恒速传动装置的三种工作状态,下面以一台4对极电机为例,说明恒装的三种工作状态。该发电机的额定转速应为60r-mN=60×400=6000r/nlin (3-7)
为了保持发电机转速为6000r/min,根据发动机转速的高低,恒装有三种工作状态。
为了便于分析,下面以某型飞机所采用的恒装为例,列出恒装中差动游星齿轮系各齿轮的齿数,如表3-1所示。该型号恒装的输入轴转速变化范围为4300~8600r/min。
表3-1 恒装中差动游星齿轮系各齿轮的齿数
动点转速时,当液压马达不转动即u12=0时,发机通过差动齿轮系传动发电机,是单纯的机械传动,此时为保持发电机转速为额定值所需要的恒装输人轴转速u1z称为制动点转速,其大小可从式(3-6)求得:
2Z=z9z2 (3-8)
uN为发电机额定转速。恒装的这种工作状态称为零差动工作方式。将表格中的齿数代入,可求得甩1z≈5719r/min。
恒装输少逍由查勤芨低王制动点转速时工在这种情况下,若单靠差动齿轮系的机械传动,发电机的转速必低于额定转速。因此,必须由液压马达的转速来补偿,即液压马达输出齿轮Z12应顺时针方向转动,使输人环形齿轮Z3逆时针方向旋转,促使第一组游星齿轮Z5转速加快,从而使恒装输出轴转速加大。
这一关系从式(3-6)也可以看出,此时L12应取负值,即液压马达输出齿轮Z12转向应与恒装输人齿轮zL转向相反。这种工作方式称为正差动工作方式(见图3-3)。将齿数代人式(3-6),可求得恒装输人轴转速最低(4300r/min)时,液压马达的转速为:输入环形齿轮,输出齿轮至泵及调速器至发动机,液压马达输出齿轮zI2输入齿轮.
图3-3 差动齿轮系的传动关系
设输人齿轮z1由发动机带动反时针方向旋转,它带动游星齿轮架z2及z10顺时针方向转动。游星齿轮架z10一方面带动液压泵齿轮Z11旋转,同时带动装在齿轮架上的两组游星齿轮z5和z6公转。第一组游星齿轮Z5与输人环形齿轮Z4内啮合。假设液压马达输出齿轮z12不转动,则与z12外啮合的输人环形齿轮也不动,这就迫使这一组游星齿轮逆时针方向自转,并带动与之外啮合的第二组游星齿轮z6顺时针方向自转。第二组游星齿轮又与输出环形齿轮z7内啮合,所以带动输出环形齿轮顺时针方向旋转,并使与输出环形齿轮Z:外啮合的输出齿轮z9逆时针方向转动。可见,恒装的输入齿轮z1与输出齿轮z9转向相同。各齿轮的旋转方向如图3-3所示。
当液压马达旋转时,其转向及转速的大小都会影响输出齿轮的转速。如液压马达输出齿轮Z12顺时针方向转动时,会带动输人环形齿轮z3逆时针方向转动,从而使原来就逆时针方向自转的第一组游星齿轮z5的转速加快,那么输出齿轮的转速也将加快。这种情况如同在原转速上“叠加”了一个同方向的转速,即液压马达转速起正的补偿作用。各齿轮转向仍如图3-3所示。
反之,当液压马达齿轮z12逆时针方向旋转时,带动输入环形齿轮z3顺时针转动,这就使得原来逆时针方向自转的第一组游星齿轮Z5转速变慢,从而使输出齿轮z9的转速也变慢。即如同在原转速方向上“叠加”了一个反方向的转速,液压马达起负的补偿作用。下面按相对运动原理求差动齿轮系的传动比。设U1、U2`U3(=U4)、U5、U6、U7(=72J)、U9分别是相应齿轮Z1、z2、z3、Z5、Z6、z7、z9的绝对转速,其中转向相反的齿轮其转速符号也相反,即一个为正,一个为负。按相对运动原理可知,当给游星齿轮系的.
 相关技术资料
相关技术资料- 7-14NeuPro NPUs+ SensPro DSP技术参数设计
- 7-14双通道ATA-2022H高压放大器
- 7-14旗舰大模型Grok 4、Grok 4 API发展趋势
- 7-14耦合仿真技术及高保真模型试验技术应用探究
- 7-14GPU、FPGA、ASIC。GPU、FPGA技术解释
- 7-14ASIC/FPGA/GPU芯片及边缘-云端
- 7-12PWM输入功率驱动器工作原理
- 7-12隔离式 DC/DC 变换器和模块优势特征
- 7-12解读集成4 个高效降压 DC/DC 变换器
- 7-12数字隔离功能全集成 DC/DC 电源变换器简述
- 7-12集成低噪声电流输入模数转换器 (ADC)应用详解
- 7-12128 通道20 位电流数字转换器应用探究
 公网安备44030402000607
公网安备44030402000607





