
RK73B1JLTD121J������״̬��ת������
����ʱ��:2019/10/18 23:44:29 ���ʴ���:1834
RK73B1JLTD121J����ԭ��,��6.5.5��ʾ��4λ�����Ƽ�������״̬���١��۲�ñ����Կ���,Q����ÿ���������嵽��ʱ��Ҫ��תһ��;o1��Ҫ��O��=1ʱ���÷�ת������,��һ�����������ص���ʱ������ת;Q2��QO=01=1ʱ��Ҫ���÷�ת����,�����̬��ת;o3����QO=Ol=O2=1�Ĵ�̬��ת;�Դ�����,������չ�������λ��������,ͬ�������Ƽ���������r��������ʵ��,����ÿ��������״̬��ת������ȷ����r����˵���ֵ,�Կ������Ƿ�ת�������Ƴ���λ�����Ƽ���������λT�������������̵�һ�㻯����ʽ
t0 =1
ti=Qi-1qi-2・・・O10��=qj (J=1,2,��,��-1)
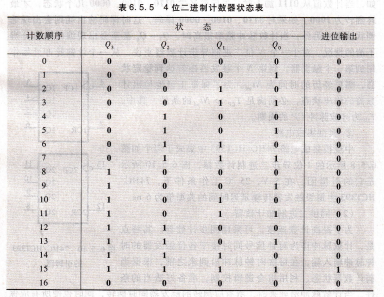
��6.5.5 4λ�����Ƽ�����״̬��
��6.5.5��ʾ��ʱ���·״̬���ļ���ʽ,ֻ������һϵ��ʱ�������ź������µ�·״̬��ת��˳��,����ij��״̬��Ϊ��̬,��һ����Ϊ��̬��
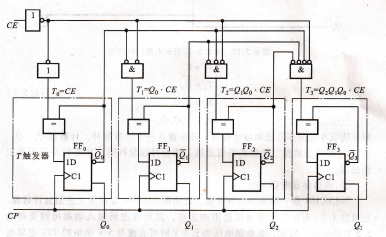
ͼ6.5.11��ʾ��4λͬ�������ƼӼ�������һ��ʵ�ַ�����ͼ��,4���㻭�߷����ھ�����D��������ͬ����ʵ��r��������������[��ͼ5,4,9(b)]����ͼ6.5.11���г���·�ļ���������
t0=cE
t1=q0=Q0・cE (652)
t2=q1q0=q1q0・ce
t3=q2q1q0=Q2Q1q0・CE
���Կ���,������ʹ�ܶ�cE=1ʱ,ʽ(6.5.2)��ʽ(6.5,1)�������������һ�ġ�ͼ6.5.12��ʾ��ͼ6.5.11��ʾ��·��ʱ��ͼ,���������ǿ��ǵ������������ӳ�ʱ��rpd�IJ��Ρ���ͼ6.5.12��֪,��ͬ����������,���ڼ�������CPͬʱ�����ڸ�������,���д�������״̬ˢ����ͬʱ���е�,���ȼ�������CP������ʱ���ͺ�һ��ɯpd�����,���״̬���첽�����Ƽ������ȶ�,�乤���ٶ�һ������첽��������Ӧ��ָ��,ͬ���������ĵ�·�ṹ���첽����������,��Ҫ����һЩ���Ƶ�·,�乤���ٶ�ҲҪ�ܵ���Щ��·�����ӳ�ʱ������ơ�
RK73B1JLTD121J����ԭ��,��6.5.5��ʾ��4λ�����Ƽ�������״̬���١��۲�ñ����Կ���,Q����ÿ���������嵽��ʱ��Ҫ��תһ��;o1��Ҫ��O��=1ʱ���÷�ת������,��һ�����������ص���ʱ������ת;Q2��QO=01=1ʱ��Ҫ���÷�ת����,�����̬��ת;o3����QO=Ol=O2=1�Ĵ�̬��ת;�Դ�����,������չ�������λ��������,ͬ�������Ƽ���������r��������ʵ��,����ÿ��������״̬��ת������ȷ����r����˵���ֵ,�Կ������Ƿ�ת�������Ƴ���λ�����Ƽ���������λT�������������̵�һ�㻯����ʽ
t0 =1
ti=Qi-1qi-2・・・O10��=qj (J=1,2,��,��-1)
��6.5.5 4λ�����Ƽ�����״̬��
��6.5.5��ʾ��ʱ���·״̬���ļ���ʽ,ֻ������һϵ��ʱ�������ź������µ�·״̬��ת��˳��,����ij��״̬��Ϊ��̬,��һ����Ϊ��̬��
ͼ6.5.11��ʾ��4λͬ�������ƼӼ�������һ��ʵ�ַ�����ͼ��,4���㻭�߷����ھ�����D��������ͬ����ʵ��r��������������[��ͼ5,4,9(b)]����ͼ6.5.11���г���·�ļ���������
t0=cE
t1=q0=Q0・cE (652)
t2=q1q0=q1q0・ce
t3=q2q1q0=Q2Q1q0・CE
���Կ���,������ʹ�ܶ�cE=1ʱ,ʽ(6.5.2)��ʽ(6.5,1)�������������һ�ġ�ͼ6.5.12��ʾ��ͼ6.5.11��ʾ��·��ʱ��ͼ,���������ǿ��ǵ������������ӳ�ʱ��rpd�IJ��Ρ���ͼ6.5.12��֪,��ͬ����������,���ڼ�������CPͬʱ�����ڸ�������,���д�������״̬ˢ����ͬʱ���е�,���ȼ�������CP������ʱ���ͺ�һ��ɯpd�����,���״̬���첽�����Ƽ������ȶ�,�乤���ٶ�һ������첽��������Ӧ��ָ��,ͬ���������ĵ�·�ṹ���첽����������,��Ҫ����һЩ���Ƶ�·,�乤���ٶ�ҲҪ�ܵ���Щ��·�����ӳ�ʱ������ơ�
��һƪ��TMS320LC31PQL40ͬ��������
��һƪ��eljre12njf2�����ķ���
 ��ؼ�������
��ؼ�������- 7-15�߷��ӻ������������Ӧ��̽��
- 7-15��Ч����4kW˫��PFC��Դ�������
- 7-15��ɢ�뵼��Ԫ��������ܡ������ܵȣ������������
- 7-15CommonGround Human AI���ļ�����
- 7-15520�߳��漶���ֻ������״�Ӧ��ǰ��
- 7-15MPronto-12 (M12 Push Pull ������R
- 7-14NeuPro NPUs+ SensPro DSP�����������
- 7-14˫ͨ��ATA-2022H��ѹ�Ŵ���
- 7-14�콢��ģ��Grok 4��Grok 4 API��չ����
- 7-14��Ϸ��漼�����߱���ģ�����鼼��Ӧ��̽��
- 7-14GPU��FPGA��ASIC��GPU��FPGA��������
- 7-14ASIC/FPGA/GPUоƬ����Ե-�ƶ�
�������
- ����FTU�������Զ���ϵͳ����
- ����FTU�������Զ���ϵͳ�Ĺ���
- A/Dת������ÿһ���������̷�Ϊ�Զ�����
- ����������ĶԵص��ݵķŵ粨
- ʵ�����ݷ������
- �غ�����Ӧ�ó���
- ����Ϣ��������л���ָ��ָ���
- �ʴ�ʽͨ�Ź�Լ�ֳ�ΪPolhg��Լ
- P487A06��Ϣͼ������ͬ��
- ���ղ�ͬ�ķ����,�غ�������
�Ƽ���������

- ѭ�������ǻ��������ź�
- ѭ�������ǻ��������źͱ�����õĿ��Ʒ�ʽ��E48S... [��ϸ]
- �߷��ӻ������������Ӧ��̽��
- ��Ч����4kW˫��PFC��Դ�������
- ��ɢ�뵼��Ԫ��������ܡ�������
- CommonGround Human AI&
- 520�߳��漶���ֻ������״�Ӧ
- MPronto-12 (M12
- ��ý��Э������SM501��Ƕ��ʽϵͳ�е�Ӧ��
- ����IEEE802.11b��EPA�¶ȱ�����
- QUICCEngine�������ƶ�IP�������
- SoC���������IJ�ҵ����
- MPC8xxϵ�д�������Ƕ��ʽϵͳ��Դ���
- dsPIC�����ڽ�����Ƶ�����е�Ӧ���о�
 ��������44030402000607
��������44030402000607





