
异步电动机与直流电动机转矩产生的原理有很大的区别
发布时间:2018/1/8 21:12:20 访问次数:792
异步电动机与直流电动机转矩产生的原理有很大的区别,异步电动机的励磁是由三相旋转磁场产生的,OPA2348AIDR它不能像直流电动机一样,固定Φ与几的夹角ρ0°)。此外,的大小虽可用霍尔传感器从气隙中直接测出,但影响狱小的励磁电流‰难以直接检测和控制。异步电动机可供检测的定子电流讶,混杂着两种成分,必须将二者分离,才能有效地进行转矩控制。
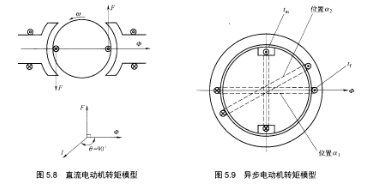
图5.9所示为模拟直流电动机绘制的异步电动机产生转矩的物理模型。图中,把三相旋转磁场用一个励磁电流为琉的旋转电磁铁代替。这样,由琉产生的磁通硼方向和处于位置钩的定子线圈电流九的方向刚好正交为⒇°,从而和直流电动机一样地产生转矩。当转子转动后,定子线圈到达新的位置饧,由于她在旋转,使冖和瑚保持90°夹角,从而产生新的转矩,使转子连续转动。因此,要使异步电动机与直流电动机一样地产生转矩并易于控制,就必须做到以下几点。
应设法将定子电流氵l按矢量变换分解为瑞和琬。
转矩电流莎t与四矢量的夹角始终保持⒛°。
(或励磁电流琉)应为恒值,或可以控制。
异步电动机与直流电动机转矩产生的原理有很大的区别,异步电动机的励磁是由三相旋转磁场产生的,OPA2348AIDR它不能像直流电动机一样,固定Φ与几的夹角ρ0°)。此外,的大小虽可用霍尔传感器从气隙中直接测出,但影响狱小的励磁电流‰难以直接检测和控制。异步电动机可供检测的定子电流讶,混杂着两种成分,必须将二者分离,才能有效地进行转矩控制。
图5.9所示为模拟直流电动机绘制的异步电动机产生转矩的物理模型。图中,把三相旋转磁场用一个励磁电流为琉的旋转电磁铁代替。这样,由琉产生的磁通硼方向和处于位置钩的定子线圈电流九的方向刚好正交为⒇°,从而和直流电动机一样地产生转矩。当转子转动后,定子线圈到达新的位置饧,由于她在旋转,使冖和瑚保持90°夹角,从而产生新的转矩,使转子连续转动。因此,要使异步电动机与直流电动机一样地产生转矩并易于控制,就必须做到以下几点。
应设法将定子电流氵l按矢量变换分解为瑞和琬。
转矩电流莎t与四矢量的夹角始终保持⒛°。
(或励磁电流琉)应为恒值,或可以控制。
上一篇:矢量控制系统的坐标变换
上一篇:坐标变换的概念
 相关技术资料
相关技术资料- 1-8异步电动机与直流电动机转矩产生的原理有很大的区别
- 1-7拖动系统的参数折算
- 10-23但是过量的反溅射必然会破坏沟槽和通孔的形貌
- 5-28反应气体
热门点击
- LAYERHYST:信号强度的层迟滞值
- TTL集成电路应用须知
- 电力MOSFET的特性
- 完成顶层电路原理图的设计
- 驱动电路的隔离
- 常用电子仪器仪表的使用
- 频率抖动的效果仅是使设备容易通过EMI试验
- 有速度传感器的转速或转矩闭环矢量控制
- MS发起的PDP上下文的去激活流程
- 采用推式递推调度瓶颈以后各级工作站直至输出缓
推荐技术资料

- 循线机器人是机器人入门和
- 循线机器人是机器人入门和比赛最常用的控制方式,E48S... [详细]
 公网安备44030402000607
公网安备44030402000607





