
晶圆加工过程要重复某些加工步骤
发布时间:2017/11/29 21:31:43 访问次数:687
晶圆加工过程要重复某些加工步骤,通常重复步骤要求相同的加工条件,因此晶K7A403609B-PC25圆可能会访问一个加工腔体多次,这种加工模式称为重入晶圆流模式钊。针对重入晶圆流模式调度问题,可以通过时间Petri网构造模型,并用P-不变量方法分析稳态性能卩5’3刨。本章参考文献[35]采用面向资源的着色时间Pctri网对集束型半导体装备的重入流程模式进行建模,描述系统加工过程,并从定性和定量两个角度分析模型的死锁问题和产能,研究避免死锁的策略。为避免重入流程模式的死锁发生,找到优化的调度方式,本章参考文献[36]首先给出单臂集束型装备的Petri网模型和死锁控制策略,推导出调度整个系统的方法。
因为死锁会导致晶圆加工过程受阻,大大降低装备的性能。本章参考文献[37]就集束型装备的死锁处理策略做了专门的研究,提出检测死锁、解决死锁、预防死锁发生的方法。在低压化学气相淀积过程中,当一片晶圆在腔体中被加工完成后,它在一定的时间范
围内必须离开加工腔体,否则,腔体内残留的气体和高温可能会造成晶圆的损坏,这种约束被定义为晶圆滞留时间约束。伍乃琪采用Petri网方法,在考虑滞留时间约束的集束型装备的建模和调度分析方面做了大量的研究工作卩3卩:“1]。伍乃琪为同时实现对系统的定量和定性分析,构建能描述集束型装备动态行为特性的面向对象Petri网(Co1oredRcsourcc-oriclltcd Petri Nct,CROPN)。CRoPN是一种有限容量的Pctri网。在该模型中,集束型装备的机械手被描述为两个有限容量的库所'l和幻。如果这两个库所中只有其中一个有标记,则表示是单臂集束型装各;若两个库所中均有标记,则表示是双臂集束型装各。
该模型解决离散事件系统建模规模巨大的问题。这一模型不依赖于工艺流程,也不受参数变化的影响,同时可以适应单臂和双臂集束型装备,是离散事件建模问题中的非常重要的进展。特别在所建立的模型中,根据问题的特点描述机械手的等待这一事件,这为进一步研究系统的控制和调度方法提供保障。
晶圆加工过程要重复某些加工步骤,通常重复步骤要求相同的加工条件,因此晶K7A403609B-PC25圆可能会访问一个加工腔体多次,这种加工模式称为重入晶圆流模式钊。针对重入晶圆流模式调度问题,可以通过时间Petri网构造模型,并用P-不变量方法分析稳态性能卩5’3刨。本章参考文献[35]采用面向资源的着色时间Pctri网对集束型半导体装备的重入流程模式进行建模,描述系统加工过程,并从定性和定量两个角度分析模型的死锁问题和产能,研究避免死锁的策略。为避免重入流程模式的死锁发生,找到优化的调度方式,本章参考文献[36]首先给出单臂集束型装备的Petri网模型和死锁控制策略,推导出调度整个系统的方法。
因为死锁会导致晶圆加工过程受阻,大大降低装备的性能。本章参考文献[37]就集束型装备的死锁处理策略做了专门的研究,提出检测死锁、解决死锁、预防死锁发生的方法。在低压化学气相淀积过程中,当一片晶圆在腔体中被加工完成后,它在一定的时间范
围内必须离开加工腔体,否则,腔体内残留的气体和高温可能会造成晶圆的损坏,这种约束被定义为晶圆滞留时间约束。伍乃琪采用Petri网方法,在考虑滞留时间约束的集束型装备的建模和调度分析方面做了大量的研究工作卩3卩:“1]。伍乃琪为同时实现对系统的定量和定性分析,构建能描述集束型装备动态行为特性的面向对象Petri网(Co1oredRcsourcc-oriclltcd Petri Nct,CROPN)。CRoPN是一种有限容量的Pctri网。在该模型中,集束型装备的机械手被描述为两个有限容量的库所'l和幻。如果这两个库所中只有其中一个有标记,则表示是单臂集束型装各;若两个库所中均有标记,则表示是双臂集束型装各。
该模型解决离散事件系统建模规模巨大的问题。这一模型不依赖于工艺流程,也不受参数变化的影响,同时可以适应单臂和双臂集束型装备,是离散事件建模问题中的非常重要的进展。特别在所建立的模型中,根据问题的特点描述机械手的等待这一事件,这为进一步研究系统的控制和调度方法提供保障。
 相关技术资料
相关技术资料- 1-2变压器在板上的放置方向应该使初级、次级电路完全隔离开
- 12-29用屏蔽体将元器件、电路、组合件、电缆或整个系统的干扰源包围起来
- 12-22K7A403609B-PC25光吸收和发射
- 11-29晶圆加工过程要重复某些加工步骤
热门点击
- 电烙铁的功率与烙铁头温度对应关系
- 应力迁移
- 电压斜坡(V-ramp)和电流斜坡(J-ra
- 整流滤波后的电压值还会受到电网电压波动和负载
- 金属钛湿法刻蚀
- oBIRCH/XIⅤA案例分析
- 扩散法制备pn结是利用扩散炉
- 套刻精度一般由光刻机上移动平台的步进
- 片湿法刻蚀过程原理
- OBIRCH雷射注入技术在90nm制程失效分
推荐技术资料
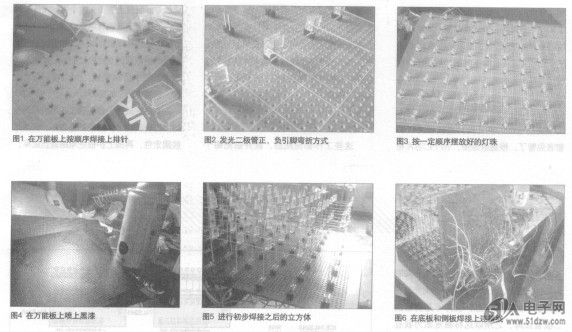
- 单片机版光立方的制作
- N视频: http://v.youku.comN_sh... [详细]
 公网安备44030402000607
公网安备44030402000607





