
目标识别
发布时间:2015/5/18 20:52:24 访问次数:455
基于位置、大小、旋转和其他不变性的特征的目标识别,近几年成为人们研究的热点问题。CL-200HR-C-TS而解决问题的关键是找到有效的不变特征。目前的几种识别特征:①视觉特征:边缘,纹理,轮廓;②变换系数特征:傅里叶描述子,Hadamand系数;③代数特征:基于图像矩阵分解;④统计特征:矩不变。
随着人工神经网络和计算机视觉技术的发展,许多国内外学者致力于不变性识别领域的研究和探索,如Hu、Dudani等的不变矩,Fu、Zahn等的傅里叶子,Arbter等的梅林不变矩以及Zernike矩等,并已成功地运用到字符识别、遥感图像匹配等领域。
下面简单介绍基于不变矩的目标识别方法。M.K.Hu首先于1962年提出了连续函数矩的定义,给出了具有平移不变性、旋转不变性和比例不变性的7个不变矩的表达式。
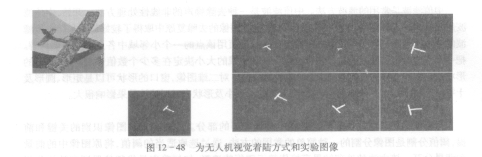
在离散状态下,二维函数f(m,n)的(p+g)阶普通矩和中心短的公式如下:采用不变矩对无人机采集到的T形目标图像计量,与模板匹配识别,然后再通过位姿提取得到无人机相对于跑道的位姿关系,进行导引着陆。实验图片如图12 -48所示。
基于位置、大小、旋转和其他不变性的特征的目标识别,近几年成为人们研究的热点问题。CL-200HR-C-TS而解决问题的关键是找到有效的不变特征。目前的几种识别特征:①视觉特征:边缘,纹理,轮廓;②变换系数特征:傅里叶描述子,Hadamand系数;③代数特征:基于图像矩阵分解;④统计特征:矩不变。
随着人工神经网络和计算机视觉技术的发展,许多国内外学者致力于不变性识别领域的研究和探索,如Hu、Dudani等的不变矩,Fu、Zahn等的傅里叶子,Arbter等的梅林不变矩以及Zernike矩等,并已成功地运用到字符识别、遥感图像匹配等领域。
下面简单介绍基于不变矩的目标识别方法。M.K.Hu首先于1962年提出了连续函数矩的定义,给出了具有平移不变性、旋转不变性和比例不变性的7个不变矩的表达式。
在离散状态下,二维函数f(m,n)的(p+g)阶普通矩和中心短的公式如下:采用不变矩对无人机采集到的T形目标图像计量,与模板匹配识别,然后再通过位姿提取得到无人机相对于跑道的位姿关系,进行导引着陆。实验图片如图12 -48所示。
上一篇:图像滤波与去噪
上一篇:位姿获取方法设计与实验
 相关技术资料
相关技术资料- 5-18目标识别
热门点击
- 大气红外吸收谱与大气窗口
- 反型层的出现说明了栅压达到阈值时
- 光纤的传输模式
- 工作特性
- CCD工作原理
- 设计的概念及特征
- 光电仪器总体设计
- 用于构成分布式光纤传感器的主要技术
- 干涉光束的相干性要求是指光束满足频率相同
- 现代仪器的发展方向
推荐技术资料
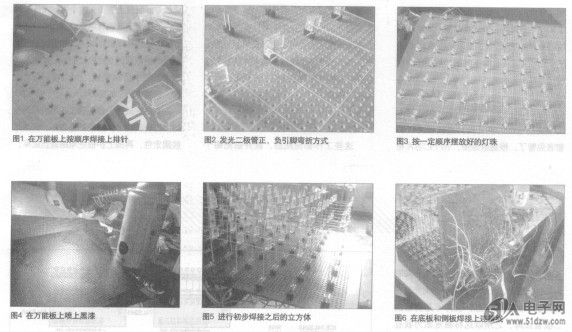
- 单片机版光立方的制作
- N视频: http://v.youku.comN_sh... [详细]
 公网安备44030402000607
公网安备44030402000607





