

位姿获取方法设计与实验
发布时间:2015/5/18 20:54:07 访问次数:906
默认摄像机坐标系与无人机机体坐标系一致。如图12 - 49所示,o。菇。),zw是世界坐标系,CL-200IR-X-TSL原点D。取跑道平面上某一点,在无人机着陆过程中,根据合作目标选取世界坐标系的原点。o。),。轴平行于合作目标的主轴方向;o。算w轴也在跑道平面内,且垂直于o。y。轴指向右方;o。z。轴垂直跑道平面指向上方。oxyz是机体坐标系,原点o取在无人机质心处,坐标与无
人机固连;oy轴与无人机机身的设计轴线平行,且处于无人机对称平面内;ox轴垂直于飞机对称平面指向右方;oz轴在无人机对称平面内,且垂直于oxy平面指向上方。无人机三个姿态角表示机体轴系与跑道轴系的关系,定义如下:
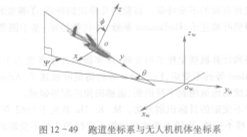
图12 - 49跑道坐标系与无人机机体坐标系
俯仰角臼:机体轴oy与跑道平面的夹角,以抬头为正。
偏航角沙:机体轴町在跑道平面上的投影与跑道轴Owy。间的夹角,以机头右偏航为正。
滚动角西:又称倾斜角,指机体轴oz与包含机体轴oy的铅垂面间的夹角,无人机向右倾斜时为正。
Tsai提出的基于RAC的定标方法是计算机视觉像机定标方面的一项亘要工作,该方法的核心是首先利用径向一致约束来求解除tz(像机光轴方向的平移)外的其他像机外参数,然后再求解相机的其他参数。而我们所要求的三个姿态角和三个位置参数都能通过这种方法求出。同时,基于RAC方法的最大好处是它所使用的大部分方程是线性方程,从而降低了参数求解的复杂性,因此其定标过程快捷,准确。
默认摄像机坐标系与无人机机体坐标系一致。如图12 - 49所示,o。菇。),zw是世界坐标系,CL-200IR-X-TSL原点D。取跑道平面上某一点,在无人机着陆过程中,根据合作目标选取世界坐标系的原点。o。),。轴平行于合作目标的主轴方向;o。算w轴也在跑道平面内,且垂直于o。y。轴指向右方;o。z。轴垂直跑道平面指向上方。oxyz是机体坐标系,原点o取在无人机质心处,坐标与无
人机固连;oy轴与无人机机身的设计轴线平行,且处于无人机对称平面内;ox轴垂直于飞机对称平面指向右方;oz轴在无人机对称平面内,且垂直于oxy平面指向上方。无人机三个姿态角表示机体轴系与跑道轴系的关系,定义如下:
图12 - 49跑道坐标系与无人机机体坐标系
俯仰角臼:机体轴oy与跑道平面的夹角,以抬头为正。
偏航角沙:机体轴町在跑道平面上的投影与跑道轴Owy。间的夹角,以机头右偏航为正。
滚动角西:又称倾斜角,指机体轴oz与包含机体轴oy的铅垂面间的夹角,无人机向右倾斜时为正。
Tsai提出的基于RAC的定标方法是计算机视觉像机定标方面的一项亘要工作,该方法的核心是首先利用径向一致约束来求解除tz(像机光轴方向的平移)外的其他像机外参数,然后再求解相机的其他参数。而我们所要求的三个姿态角和三个位置参数都能通过这种方法求出。同时,基于RAC方法的最大好处是它所使用的大部分方程是线性方程,从而降低了参数求解的复杂性,因此其定标过程快捷,准确。
 相关技术资料
相关技术资料- 5-18位姿获取方法设计与实验
- 5-18图像滤波与去噪

 公网安备44030402000607
公网安备44030402000607





