
二维视觉坐标测量机原理
发布时间:2015/5/11 21:11:14 访问次数:1119
下有光源照明,显微物ADS1100A3IDBVT镜将工件成像到CCD光敏面上,通过图像采集卡将图像信息送人计算机,并进行图像滤波、边缘提取、亚像素细分、边缘拟合等处理。对于较小的工件,如果能一次完全成像到CCD光敏面范围内,则对CCD光敏元像素当量标定后,可直接计算出其几何参数。
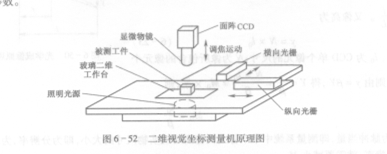
图6 -52二维视觉坐标测量机原理图
对于比较大的工件,不能一次完全成像到CCD光敏面范围内,需要移动二维工作台,对其各个待测区域进行成像,同时采集石、y方向光栅数据。设CCD光敏面坐标系内一点坐标为(Xl,Yi),此时对应的横向和纵向光栅坐标为(X。,匕),则该点综合坐标为X=X。+石i,Y=Ye +yL,这是Xe与Xi、Ye与Yi在坐标方向一致的情况下,否则应考虑坐标X。、Ye与戈£、),i的夹角。这种测量方法的特点是不需要像传统的光学测量仪器那样将对被测件准确对准到瞄准线上,只要被测件进入CCD成像区域就可以测量,因而测量速度快,测量精度可达Inm。
下有光源照明,显微物ADS1100A3IDBVT镜将工件成像到CCD光敏面上,通过图像采集卡将图像信息送人计算机,并进行图像滤波、边缘提取、亚像素细分、边缘拟合等处理。对于较小的工件,如果能一次完全成像到CCD光敏面范围内,则对CCD光敏元像素当量标定后,可直接计算出其几何参数。
图6 -52二维视觉坐标测量机原理图
对于比较大的工件,不能一次完全成像到CCD光敏面范围内,需要移动二维工作台,对其各个待测区域进行成像,同时采集石、y方向光栅数据。设CCD光敏面坐标系内一点坐标为(Xl,Yi),此时对应的横向和纵向光栅坐标为(X。,匕),则该点综合坐标为X=X。+石i,Y=Ye +yL,这是Xe与Xi、Ye与Yi在坐标方向一致的情况下,否则应考虑坐标X。、Ye与戈£、),i的夹角。这种测量方法的特点是不需要像传统的光学测量仪器那样将对被测件准确对准到瞄准线上,只要被测件进入CCD成像区域就可以测量,因而测量速度快,测量精度可达Inm。
 相关技术资料
相关技术资料- 5-11二维视觉坐标测量机原理
热门点击
- 将辐射量换算成每日的峰值日照小时数的方法是
- PN结光电效应
- 硫化镉CdS和硒化镉CdSe光敏电阻
- 光电三极管的特性
- 全球路由选择前缀(Global Routin
- 三角测量原理示
- 分组交换则采用存储转发技术
- 双频激光测长仪与单频干涉仪相比的特点
- 选择晶片的厚度
- 反射衍射测量法
推荐技术资料

- 硬盘式MP3播放器终级改
- 一次偶然的机会我结识了NE0 2511,那是一个远方的... [详细]
 公网安备44030402000607
公网安备44030402000607





