
底板模块
发布时间:2013/11/20 19:26:26 访问次数:1005
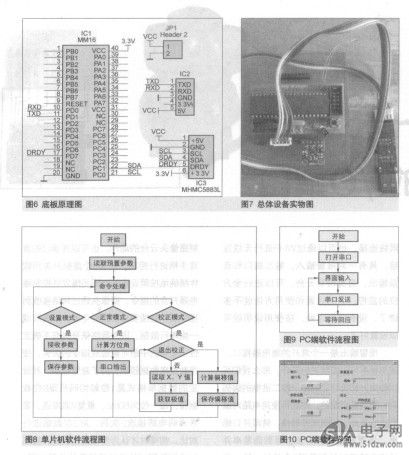
各模块之间需要通过底板进行连接,EL2480CSZ-T13其原理图如图6所示。其中与HMC5883L模块的I2C接口使用的是ATmega16的硬件接口,因此需要连接PCO与PC1端口,DRDY则与PD7端口连接。串口模块与单片机的硬件串口端口PDO、PD1连接,总体连接相对简单。将圈3 ATmega16最小系统实物圈各个模块通过插座、插针以及连接线连接,设备最终的样子如图7所示。
电子罗盘的软件分为两部分:单片机上的软件以及PC端的控制软件。平时工作时,只需运行单片机上的程序,PC端软件仅显示当前数据。当需要配置或者校正时,要配合PC端软件使用。
单片机的软件流程如图8所示。参数保存在单片机的EEPROM申,掉电后仍然可以保存。
PC机与单片机进行串口连接,平时工作时,单片机工作在正常模式,PC端软件通过串口查询当前方位角并显示在界面上。当需要配置电子罗盘时,可以通过PC端软件设置磁偏角,参数都会保存在单片机的EEPROM中,罗盘重启后还按之前的设置参数运行。当需要对罗盘进行校正时,通过PC端软件启动校正流程。用户需要在水平面上缓慢旋转罗盘360。,然后通过PC端软件告知罗盘结束校正,此时罗盘会自动计算出X、Y轴的偏移值并保存,同时PC端软件上会显示这些偏移值。
PC端软件采用Visual C++ 2005编写,基于MFC框架开发,软件流程如图9所示。软件框架采用的是查询方式,由PC控制软件作为主动方,发送串口命令到单片机,单片机则作为被动方,将结果返回给PC控制软件。
通过界面上的按钮,用户可以设置电子罗盘、进行校正,并看到当前方位角的显示,界面如图10所示。使用时,先将单片机与PC串口连接,然后打开对应的串口号,此时即可以看到当前方位角显示在偏角栏里。如果需要设置磁偏角,只需将数值写入对话框,并点击“设置”按钮即可。校正功能相对比较复杂,在点击“开始校正”后,需要手动旋转电子罗盘360。,然后再点击“结束校正”,最大、最小偏移值即会显示在界面上。
各模块之间需要通过底板进行连接,EL2480CSZ-T13其原理图如图6所示。其中与HMC5883L模块的I2C接口使用的是ATmega16的硬件接口,因此需要连接PCO与PC1端口,DRDY则与PD7端口连接。串口模块与单片机的硬件串口端口PDO、PD1连接,总体连接相对简单。将圈3 ATmega16最小系统实物圈各个模块通过插座、插针以及连接线连接,设备最终的样子如图7所示。
电子罗盘的软件分为两部分:单片机上的软件以及PC端的控制软件。平时工作时,只需运行单片机上的程序,PC端软件仅显示当前数据。当需要配置或者校正时,要配合PC端软件使用。
单片机的软件流程如图8所示。参数保存在单片机的EEPROM申,掉电后仍然可以保存。
PC机与单片机进行串口连接,平时工作时,单片机工作在正常模式,PC端软件通过串口查询当前方位角并显示在界面上。当需要配置电子罗盘时,可以通过PC端软件设置磁偏角,参数都会保存在单片机的EEPROM中,罗盘重启后还按之前的设置参数运行。当需要对罗盘进行校正时,通过PC端软件启动校正流程。用户需要在水平面上缓慢旋转罗盘360。,然后通过PC端软件告知罗盘结束校正,此时罗盘会自动计算出X、Y轴的偏移值并保存,同时PC端软件上会显示这些偏移值。
PC端软件采用Visual C++ 2005编写,基于MFC框架开发,软件流程如图9所示。软件框架采用的是查询方式,由PC控制软件作为主动方,发送串口命令到单片机,单片机则作为被动方,将结果返回给PC控制软件。
通过界面上的按钮,用户可以设置电子罗盘、进行校正,并看到当前方位角的显示,界面如图10所示。使用时,先将单片机与PC串口连接,然后打开对应的串口号,此时即可以看到当前方位角显示在偏角栏里。如果需要设置磁偏角,只需将数值写入对话框,并点击“设置”按钮即可。校正功能相对比较复杂,在点击“开始校正”后,需要手动旋转电子罗盘360。,然后再点击“结束校正”,最大、最小偏移值即会显示在界面上。
 相关技术资料
相关技术资料- 11-20底板模块
热门点击
- 利用无线路由器将普通摄像改造成无线摄像头
- 常小数点的七段共阴极半导体数码管BS201的
- 自制经典的1875功放
- 应变灵敏度因数(gauge factor)
- 正弦波公式
- 量化和编码
- 正弦波公式的推导
- 阻抗和相角随频率的变化
- 自制电压基准法
- 七段字形译码器
推荐技术资料

- 自制经典的1875功放
- 平时我也经常逛一些音响DIY论坛,发现有很多人喜欢LM... [详细]
 公网安备44030402000607
公网安备44030402000607





