
SyncPos motion controller卡的现场调试应用
发布时间:2012/6/11 19:59:25 访问次数:898
为了实现从电动机快速、准确的跟踪MAX693CWE+主电动机,还必须对内部的PID参数、前馈速度参数、前馈加速度进行调整,同步卡内部的调节原理图如图19-8所示。
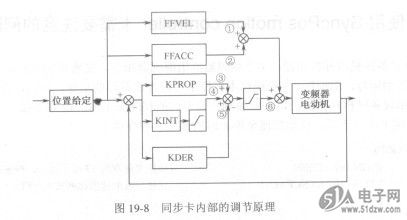
图中,“KI,ROP”为调节参数P,“KINT”为调节参数,“KDER”为调节参数D,前馈速度为“FFVEL”,前馈加速度为“FFACC”,从图19-8的控制原理可以得出,前馈速度“FFVEL”和前馈加速度“FFACC”是直接把位置指令送给输出,没有反馈调节的延时问题,所以速度比PID反馈调节要快,但是它无法实现没有跟踪误差的调节。调整好这些参数,对于实现系统的准快稳至关重要。
这些参数在变频器的默认地址中,“KPROP”在702项显示和更改,“KINT”在704项显示和更改,“KDER”在703项显示和更改,“FFVEL”在707项显示和更改,“FFACC”在708项显示和更改。
快速调试方法如下:
1)让控制主电动机的变频器按一个固定速度运行,从电动机的变频器同步选项,输入“KPROP一=0:“KINT”=0;“KDER”=0,逐渐增大前馈速度FFVEL值,测量从电动机的速度,使该速度接近需要的传动速度,以实际为准,也可以用转速表直接测量工件表面的实际速度,也可以通过编码器分辨率、传动比和辊径计算得出。
2)让主电动机加速减速反复运行,逐渐增大前馈加速度FFACC值,使从电动机速度的跟踪误差在加减速时误差最小。
3)让控制主电动机的变频器按一个固定速度或加减速运行,增加“KPROP”值使位置误差尽量小,出现振荡或声音现时,取该值的600/0作为结果写入,以留有稳定余量。
4)让控制主电动机的变频器按一个固定速度或加减速运行,增加“KINT”值使位置误差尽量快地减小,如果出现振荡,取该值的60%作为结果写入。
5)让控制主电动机的变频器按一个固定速度或加减速运行,增加“KDER”值使位置误差变化尽量小。
为了实现从电动机快速、准确的跟踪MAX693CWE+主电动机,还必须对内部的PID参数、前馈速度参数、前馈加速度进行调整,同步卡内部的调节原理图如图19-8所示。
图中,“KI,ROP”为调节参数P,“KINT”为调节参数,“KDER”为调节参数D,前馈速度为“FFVEL”,前馈加速度为“FFACC”,从图19-8的控制原理可以得出,前馈速度“FFVEL”和前馈加速度“FFACC”是直接把位置指令送给输出,没有反馈调节的延时问题,所以速度比PID反馈调节要快,但是它无法实现没有跟踪误差的调节。调整好这些参数,对于实现系统的准快稳至关重要。
这些参数在变频器的默认地址中,“KPROP”在702项显示和更改,“KINT”在704项显示和更改,“KDER”在703项显示和更改,“FFVEL”在707项显示和更改,“FFACC”在708项显示和更改。
快速调试方法如下:
1)让控制主电动机的变频器按一个固定速度运行,从电动机的变频器同步选项,输入“KPROP一=0:“KINT”=0;“KDER”=0,逐渐增大前馈速度FFVEL值,测量从电动机的速度,使该速度接近需要的传动速度,以实际为准,也可以用转速表直接测量工件表面的实际速度,也可以通过编码器分辨率、传动比和辊径计算得出。
2)让主电动机加速减速反复运行,逐渐增大前馈加速度FFACC值,使从电动机速度的跟踪误差在加减速时误差最小。
3)让控制主电动机的变频器按一个固定速度或加减速运行,增加“KPROP”值使位置误差尽量小,出现振荡或声音现时,取该值的600/0作为结果写入,以留有稳定余量。
4)让控制主电动机的变频器按一个固定速度或加减速运行,增加“KINT”值使位置误差尽量快地减小,如果出现振荡,取该值的60%作为结果写入。
5)让控制主电动机的变频器按一个固定速度或加减速运行,增加“KDER”值使位置误差变化尽量小。
 相关技术资料
相关技术资料- 6-11SyncPos motion controller卡的现场调试应用
热门点击
- LC振荡电路的频率调整
- Q-H曲线带驼峰的水泵工作状况
- 输入补偿电压
- 渥尔曼自举电路
- LTC4001充电电路板
- 锂电池的三种通用充电方式
- 变频器的V/f控制
- 电流镜像电路是恒流电流
- 局部最优和整体最优的关系
- 单片机的选型
推荐技术资料
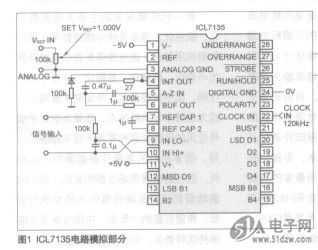
- 自制智能型ICL7135
- 表头使ff11CL7135作为ADC,ICL7135是... [详细]
 公网安备44030402000607
公网安备44030402000607





