
位置脉冲串指令信号输入
发布时间:2012/6/9 14:34:58 访问次数:2841
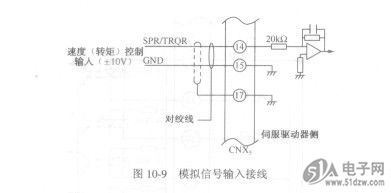
A4型伺服驱动器用于速度或EPM7064SLC44-10N转矩控制方式时,速度(或转矩)模拟量输入信号连接方式如图10-9所示,用+10V的电压信号控制A4型伺服驱动器的输出速度(或转矩)及方向。对于有些位置随动控制系统,也可以用同步控制器(或定位控制器)输出模拟信号,控制伺服驱动器的速度,利用伺服驱动器的旋转编码器脉冲输出信号作为反馈,送回同步控制器,组成闭环,实现精确的位置控制。
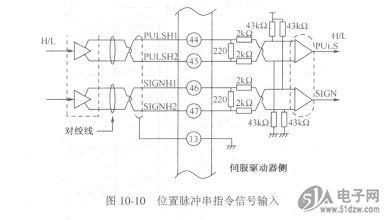
A4型伺服驱动器用于位置控制方式时,位置脉冲串指令信号输入如图10-10所示,在图10-10中,PULSHl (44)、PULSH2 (45)、SIGNHl (46)、SIGNH2 (47)为差分输入,它们可以接收上一级编码器的位置指令,或PLC及其他伺服驱动器发出的位置指令。
A4型伺服驱动器可以把本机的旋转编码器脉冲信号输出,如图10-11所示,输出的脉冲信号作为下一级伺服驱动器的位置跟踪指令,或反馈给同步控制器用于位置精确定位。
A4型伺服驱动器用于速度或EPM7064SLC44-10N转矩控制方式时,速度(或转矩)模拟量输入信号连接方式如图10-9所示,用+10V的电压信号控制A4型伺服驱动器的输出速度(或转矩)及方向。对于有些位置随动控制系统,也可以用同步控制器(或定位控制器)输出模拟信号,控制伺服驱动器的速度,利用伺服驱动器的旋转编码器脉冲输出信号作为反馈,送回同步控制器,组成闭环,实现精确的位置控制。
A4型伺服驱动器用于位置控制方式时,位置脉冲串指令信号输入如图10-10所示,在图10-10中,PULSHl (44)、PULSH2 (45)、SIGNHl (46)、SIGNH2 (47)为差分输入,它们可以接收上一级编码器的位置指令,或PLC及其他伺服驱动器发出的位置指令。
A4型伺服驱动器可以把本机的旋转编码器脉冲信号输出,如图10-11所示,输出的脉冲信号作为下一级伺服驱动器的位置跟踪指令,或反馈给同步控制器用于位置精确定位。
 相关技术资料
相关技术资料- 12-14常用电阻器的特点及应用
- 6-9位置脉冲串指令信号输入
热门点击
- 推挽型射极跟随器
- 使用PNP晶体管的射极跟随器
- 使用恒流负载的射极跟随器
- 声表面波器件的特点和可靠性要求
- 频率特性与群延迟特性
- 位置脉冲串指令信号输入
- 晶体管的选择
- 作为同相放大电路工作时
- 使用功率MOSFET
- 0P放大器与推挽射极跟随器的组合(之一)
推荐技术资料

- 泰克新发布的DSA830
- 泰克新发布的DSA8300在一台仪器中同时实现时域和频域分析,DS... [详细]
 公网安备44030402000607
公网安备44030402000607





