
步进继电器的结构及工作原理
发布时间:2012/3/24 20:40:40 访问次数:1263
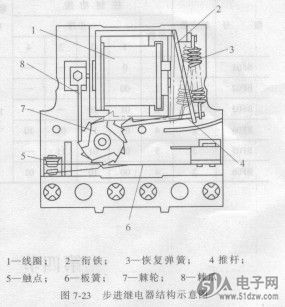
步进继电器的内部结构如图7-23所示。 BCM35243KFEB1G它由线圈、衔铁、推动杆、棘轮、棘爪及触点等组成。它的棘轮有三层,中间一层是作步进运动用的。
当线圈通以电流时,线圈便产生磁场,从而使衔铁在电礅吸力的作用下吸向铁心,此时衔铁带动推杆使中间棘轮逆时针转动一步,于是上、下两层棘轮使板簧移动。由于触点是和板簧固定在一起的,所以板簧的移动就会使上、下两层触点改变接触状态。当驱动电脉冲消失后,线圈失去电流,电磁吸力也随之消失,衔铁在恢复弹簧的作用下恢复到初始状态,此时棘爪顶住棘轮上的齿面不让棘轮发生转动,起到了定位的作用,因此触点方能保持状态不变。
只要改变上、下两层棘轮的齿数和齿形,便可得到1~2个触点、2~4个步序为一个循环的、具有不同控制功能的产品系列。
步进继电器的内部结构如图7-23所示。 BCM35243KFEB1G它由线圈、衔铁、推动杆、棘轮、棘爪及触点等组成。它的棘轮有三层,中间一层是作步进运动用的。
当线圈通以电流时,线圈便产生磁场,从而使衔铁在电礅吸力的作用下吸向铁心,此时衔铁带动推杆使中间棘轮逆时针转动一步,于是上、下两层棘轮使板簧移动。由于触点是和板簧固定在一起的,所以板簧的移动就会使上、下两层触点改变接触状态。当驱动电脉冲消失后,线圈失去电流,电磁吸力也随之消失,衔铁在恢复弹簧的作用下恢复到初始状态,此时棘爪顶住棘轮上的齿面不让棘轮发生转动,起到了定位的作用,因此触点方能保持状态不变。
只要改变上、下两层棘轮的齿数和齿形,便可得到1~2个触点、2~4个步序为一个循环的、具有不同控制功能的产品系列。
 相关技术资料
相关技术资料- 3-24步进继电器的结构及工作原理
热门点击
- ZigBee协议栈
- ADC动态范围
- PEGASIS及 Hierarchical-
- 基于12位ADC的低功耗信号调理电路
- 无线传感器网络信道接入概述
- 上电复位( POR)的时序
- 路由协议设计的关键问题
- SPI通信
- 固态继电器应用电路
- ZigBee通信过程
推荐技术资料

- 泰克新发布的DSA830
- 泰克新发布的DSA8300在一台仪器中同时实现时域和频域分析,DS... [详细]
 公网安备44030402000607
公网安备44030402000607





