
配置隔离式SSR设计实时调节TMCM-1617伺服驱动器的各种模式
发布时间:2021/8/3 8:14:49 访问次数:404
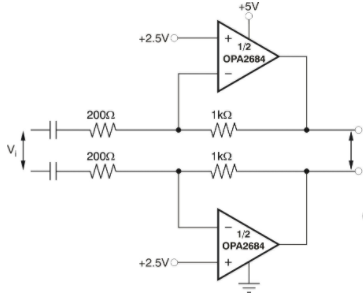
在配置隔离式SSR设计时,通过将光伏耦合器与MOSFET结合使用,便可轻松实现光继电器难以支持的高压大电流开关。
在驱动栅压不低于10V的高压功率MOSFET时,需要串联两个东芝的现有产品TLP3906,因为其开路电压较低。
TLP3910的最小开路电压是14V,是TLP3906的两倍。只需一个就能驱动高压功率MOSFET的栅极。这有助于减少部件数量。
TMCM-1617-GRIP-REF参考设计符合EoAT机械臂夹具所采用的标准外形尺寸,支持工业以太网EtherCAT、IO-Link或RS-485通信,提供软件可编程的音频和数字输入/输出,可以利用Trinamic运动控制语言集成开发环境(TMCL-IDE)进行配置。
参考设计集成了基于硬件的FOC、软件可配置输入/输出,以及3个通信栈,整个方案尺寸只有4,197 mm2。 可实时调节TMCM-1617伺服驱动器的各种模式,包括机械夹具的位置和抓力,增大灵活性,提高生产效率。
(素材来源:eccn和ttic.如涉版权请联系删除。特别感谢)
在配置隔离式SSR设计时,通过将光伏耦合器与MOSFET结合使用,便可轻松实现光继电器难以支持的高压大电流开关。
在驱动栅压不低于10V的高压功率MOSFET时,需要串联两个东芝的现有产品TLP3906,因为其开路电压较低。
TLP3910的最小开路电压是14V,是TLP3906的两倍。只需一个就能驱动高压功率MOSFET的栅极。这有助于减少部件数量。
TMCM-1617-GRIP-REF参考设计符合EoAT机械臂夹具所采用的标准外形尺寸,支持工业以太网EtherCAT、IO-Link或RS-485通信,提供软件可编程的音频和数字输入/输出,可以利用Trinamic运动控制语言集成开发环境(TMCL-IDE)进行配置。
参考设计集成了基于硬件的FOC、软件可配置输入/输出,以及3个通信栈,整个方案尺寸只有4,197 mm2。 可实时调节TMCM-1617伺服驱动器的各种模式,包括机械夹具的位置和抓力,增大灵活性,提高生产效率。
(素材来源:eccn和ttic.如涉版权请联系删除。特别感谢)
 相关技术资料
相关技术资料- 7-14NeuPro NPUs+ SensPro DSP技术参数设计
- 7-14双通道ATA-2022H高压放大器
- 7-14旗舰大模型Grok 4、Grok 4 API发展趋势
- 7-14耦合仿真技术及高保真模型试验技术应用探究
- 7-14GPU、FPGA、ASIC。GPU、FPGA技术解释
- 7-14ASIC/FPGA/GPU芯片及边缘-云端
- 7-12PWM输入功率驱动器工作原理
- 7-12隔离式 DC/DC 变换器和模块优势特征
- 7-12解读集成4 个高效降压 DC/DC 变换器
- 7-12数字隔离功能全集成 DC/DC 电源变换器简述
- 7-12集成低噪声电流输入模数转换器 (ADC)应用详解
- 7-12128 通道20 位电流数字转换器应用探究

 公网安备44030402000607
公网安备44030402000607





