

双极型步进电机芯片通过I/O引脚及SPI接口连接至外部微控制器
发布时间:2023/6/25 23:23:55 访问次数:155
NCV70522汽车自适应前照灯系统电路,由于机械结构的限制,自适应前照灯系统(AFS)应用中,步进电机有时可能会堵转。一旦电机堵转,电子控制单元(ECU)将失去前照灯位置的跟踪信息并做出不恰当的反应,滋生极严重的安全问题,所以AFS 应用中堵转检测是必不可少的。
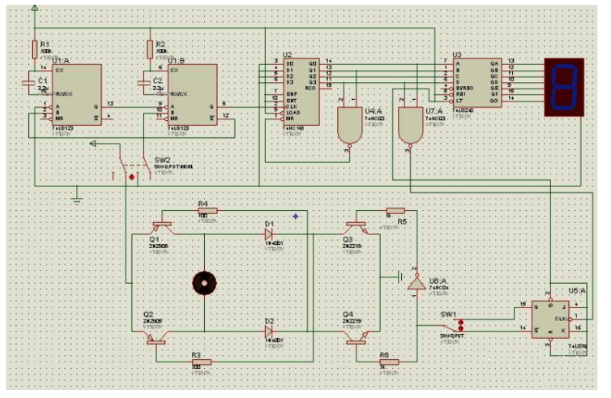
555构成的多谐振荡电路产生方波信号接到74LS196时钟端触发74LS196加计数器计数,并通过74LS248驱动七段共阴极数码管显示计数。加计数器计数满十,通过74HC20与非门产生下降沿信号驱动双JK触发器使JK触发器构成的T‘触发器输出取非,从而驱动三极管构成的开关电路,通过各个三极管的导通与截止来实现直流电机两端的压差的正负跳变,驱动直流电动机的正反转,实现小车的前进与后退。
通过调节四个单刀五掷开关可以改变多谐电路输出方波周期,来调节小车的前进与后退的时间。多谐振荡电路产生方波信号接入到74196时钟端,驱动74196进行加计数。
福建芯鸿科技有限公司http://xhkjgs.51dzw.com
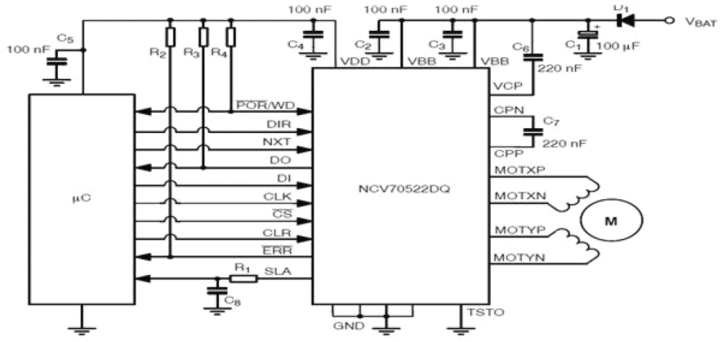
NCV70522是一款微步步进电机驱动器,用于双极型步进电机。这芯片通过I/O 引脚及SPI 接口连接至外部微控制器。NCV70522输出电流有多种选择。它根据“NXT”输入引脚上的脉冲信号以及方向寄存器[DIRCTRL]或“DIR”输入引脚的状态来转动下一个微步。
这器件提供从满步到32微步的细分、由SPI寄存器SM[2:0]来选择的7种步进模式。
当系统上电时候,微控制器就会初始化,NCV70522复位。这些动作完成时,线圈电流及步进模式将被设定。然后电机驱动器将启用。NXT脉冲将被发送实现转动电机。电机转速等于NXT脉冲频率乘以步进细分模式的值。
机器人行走电路由驱动电路和直流电机的正反转电路两个单元构成。电路通过运用555构成的多谐振荡电路,同步计数器74LS196,七段译码器 74LS248,双JK触发器等基本单元电路,通过上述基本电路的级联组合,构成机器人行走电路。电路有效地实现机器人的行走与后退,通过调节阻值的大小而控制行走的时间,时间在数码显示管显示。利用三极管的导通和截止控制机器人的行走方向,从而满足设计电路的要求。
555构成多谐振荡电路产生方波信号,74LS196构成十进制计数器,74LS248控制七段共阴极数码管显示电路显示,计数器计数满产生触发信号触发双JK触发器,双JK触发器在触发信号的作用下输出发生高低电平跳变,触发器发生信号驱动直流电机两端压差发生正负跳变,直流电机正反转,实现机器人的前进和后退。电路中各个开关控制电机的转动及转动方向和时间。
(素材:chinaaet.如涉版权请联系删除)
NCV70522汽车自适应前照灯系统电路,由于机械结构的限制,自适应前照灯系统(AFS)应用中,步进电机有时可能会堵转。一旦电机堵转,电子控制单元(ECU)将失去前照灯位置的跟踪信息并做出不恰当的反应,滋生极严重的安全问题,所以AFS 应用中堵转检测是必不可少的。
555构成的多谐振荡电路产生方波信号接到74LS196时钟端触发74LS196加计数器计数,并通过74LS248驱动七段共阴极数码管显示计数。加计数器计数满十,通过74HC20与非门产生下降沿信号驱动双JK触发器使JK触发器构成的T‘触发器输出取非,从而驱动三极管构成的开关电路,通过各个三极管的导通与截止来实现直流电机两端的压差的正负跳变,驱动直流电动机的正反转,实现小车的前进与后退。
通过调节四个单刀五掷开关可以改变多谐电路输出方波周期,来调节小车的前进与后退的时间。多谐振荡电路产生方波信号接入到74196时钟端,驱动74196进行加计数。
福建芯鸿科技有限公司http://xhkjgs.51dzw.com
NCV70522是一款微步步进电机驱动器,用于双极型步进电机。这芯片通过I/O 引脚及SPI 接口连接至外部微控制器。NCV70522输出电流有多种选择。它根据“NXT”输入引脚上的脉冲信号以及方向寄存器[DIRCTRL]或“DIR”输入引脚的状态来转动下一个微步。
这器件提供从满步到32微步的细分、由SPI寄存器SM[2:0]来选择的7种步进模式。
当系统上电时候,微控制器就会初始化,NCV70522复位。这些动作完成时,线圈电流及步进模式将被设定。然后电机驱动器将启用。NXT脉冲将被发送实现转动电机。电机转速等于NXT脉冲频率乘以步进细分模式的值。
机器人行走电路由驱动电路和直流电机的正反转电路两个单元构成。电路通过运用555构成的多谐振荡电路,同步计数器74LS196,七段译码器 74LS248,双JK触发器等基本单元电路,通过上述基本电路的级联组合,构成机器人行走电路。电路有效地实现机器人的行走与后退,通过调节阻值的大小而控制行走的时间,时间在数码显示管显示。利用三极管的导通和截止控制机器人的行走方向,从而满足设计电路的要求。
555构成多谐振荡电路产生方波信号,74LS196构成十进制计数器,74LS248控制七段共阴极数码管显示电路显示,计数器计数满产生触发信号触发双JK触发器,双JK触发器在触发信号的作用下输出发生高低电平跳变,触发器发生信号驱动直流电机两端压差发生正负跳变,直流电机正反转,实现机器人的前进和后退。电路中各个开关控制电机的转动及转动方向和时间。
(素材:chinaaet.如涉版权请联系删除)
上一篇:TSV技术芯片信号路径的传输速率
 相关技术资料
相关技术资料- 6-16DC/DC 降压电源模块技术参数设计
- 6-16集成高效降压 DC/DC 变换器特性和优势
- 6-16I2C 接口和 PmBUS 及 OTP/MTP 存储器应用
- 6-16IGBT高效率2.5KW空调电源方案
- 6-16NCP1622+NCP13992的100W 适配器电源应用
- 6-16Power Management Buck/降压转换器
- 6-13VL53L4CX飞行时间传感器应用前景
- 6-13高性能传感器芯片和模拟芯片参数设计
- 6-13集成MOSFET同步降压变换器应用探究
- 6-13电流监控器 SATAIG 控制双通道限流开关
- 6-13 48 通道 LED 驱动器产品特性和优势
- 6-13双相非隔离式高效率降压电源模块

 公网安备44030402000607
公网安备44030402000607





