

JBXFD2G06MSSDSMRҺλ������������
����ʱ��:2020/1/28 20:39:11 ���ʴ���:1015
JBXFD2G06MSSDSMR��������ʽλ�ƴ���������������������״���������Լ���λ����,�����ֻ���������λ�ơ������Լ���������ϵ���ȡ�����λ�Ʒ�Χ���Դ�0~1mm��0~500 mm,�ֱ��ʿ��������Χ��0.1%��
��ͬ������ͬ����,��ͬ������ͬ���������ڲ�����λ�Ƶı�ѹ��ʽ��������
��ͬ����,��ͬ�����Ĺ����빤��ԭ��,��ͬ�����DZ��������ת��ѹ�����ļ���ͬ�����Ľṹʾ��ͼ��ͼ9-52(a)��ʾ��
�����ĸ����Ķ��Ӻ�һ������������������״��ת����ɡ��ڶ����ĸ����ϵ���ֻ������ͬ����Ȧ���ӳɳ�������,������ֻ������ͬ����Ȧ���ӳɴμ����顣��Ȧ�Ĵ��ӷ�����ͼ9-52(b)��ʾ��
ͼ9-52 ��ͬ�����ṹʾ�⼰����ͼ,�ٶ������ĸ����ϵij������鵥����Ȧ�����á�1��ʾ,�μ����鵥����Ȧ������u2��ʾ�����������鼤��ʱ,�ڸ������ϲ����Ĵ�ͨΪ��1����2����3����4����1��3��2��4����Դż���,��ͨ������һ�µ�,ͼ9-52�м�ͷ�����ʾ��Щ��ͨ��ijһ˲ʱ��������ת��ת��ʱ,����ı仯������μ������и����綯�Ƶı仯���ĶԳ��μ���Ȧ�������ĸ���ѹ����
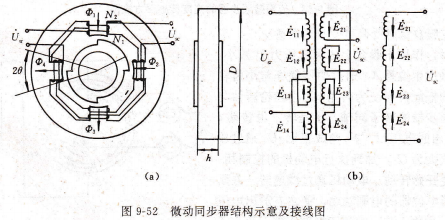
�ڳ�ʼλ�æ�=0��ʱ,ת�ӵ�ÿ��������ס�˶��Ӽ���һ�롣��ʱ,�ĸ����Ӽ��Ĵ�·���Գ�,���,ͨ�������ĸ����Ĵ�ͨ��С�����,����l=��2=��3=��4�������ĸ��μ���Ȧ�и������ƶ����,�����ڴμ���Ȧ1��3��2��4����,��������ѹΪ�㡣
��ת��˳ʱ��ת��һ���Ƕ�+��ʱ,2��4������Ը����������,��1��3������Ը��������С�����2��4�������С��ͨ����,�μ���Ȧ2��4�����綯������;�෴,1��3�����������ͨ��С,�μ���Ȧ1��3��Ӧ���Ƽ�С�����,�ܵ������ѹ����Ϊ��,������ѹ��2��4��Ȧ�и�Ӧ����ͬ��,����˳ʱ��ת�Ǧ������ȡ�
��ת�ӷ�ʱ��ת��һ���ǶȨD��ʱ,�����ǰ���෴,��Ȧ1��3�ĸ����綯�Ʊ���Ȧu0�D������Ƶ��;
Eu�D������ѹ��ֵ��
��ʽ(9-22)���Կ���,�����ѹ�ǵ�����,���ֵ�ı仯��Ӧ�˽�λ�Ƶı仯��
�ڽ��н�λ�Ʋ���ʱ,һ�����һ�Խṹ���в���ͬ�������ͬ��ϵͳ,��ͼ9-55��ͬ����ϵͳ��,һ��ͬ������Ϊ��λ�ƴ�����,���Ʒ��ͻ�;��һ��ͬ������Ϊ��¼װ��,���ƽ��ջ���
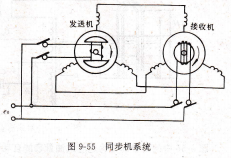
��ͬһ������ѹ����ϵͳ�е�����ת��,�����ͻ�ת��ת��ijһλ��,�䶨�����齫�����Ӧ�ĸ�Ӧ�綯��,����Щ��Ӧ�綯�Ƽӵ����ջ���Ӧ�Ķ�����Ȧ��,ʹ���ջ���ת����һ��ת�ص����ö�ת����ֱ�����ջ�ͬ����ϵͳ��,���ݽ��ջ�ת�ӵ�ת�ǾͿ��ж����ͻ��Ľ�λ�ơ�
ͬ�����ɲ��λ�Ƶķ�ΧΪ360��,����Ϊ��0.5%,���ȡ�0.1��~��0.7�㡣���ڼ���Ƶ�ʳ���40 Hz��400 Hz��������ͬ�����Ķ�̬��Ӧ����,����,ת��ת������Ҳ�����䶯̬��Ӧ������̫��,һ�����ת��1200r/min�½��в�����
Һλ������������,����ʽҺλ������,����ʽҺλ�������ڷɻ��ϵĵ���Ӧ�þ��ǵ���ʽ������,���Բ����ɻ�������ȼ�͵Ĵ���������ʽ�������ĺô�����ȫȡ���˻�е��������,�ṹ�������С,���ڽ��������������ĸ�������װ��һ��������,�ڲ�������ʱ,�ܼ��ٷɻ���б����ʱ�����
����ʽ������ʵ������ͨ������������ȼ��(ú�ͻ�����)��Һ��λ�ö���Ӳ��ȼ�͵Ĵ�����ͼ9-56��һ�ֵ���ʽ��������ԭ��ͼ��ͼ�����Ϊ����ͬ�Ľ���ԲͲ(����н����Ʋ������Ͳ)��ɵ�����,��������ֱ�ز���������,����������һ���ֽ�������,����ij����������Ķ��ٶ��䡣���������ϰ벿�������,��˵������н������к����Һ�沿�ּ����Ľ��ʲ�ͬ,��һ������,��һ�ǿ����������Ļ����(�����ڿ���),����һ�����ʱ仯�͵ĵ���ʽ���������ܵĵ�����CxΪ2t��oFr=r22t(er-��o)(9-23)
ʽ�� eO,erһ�ֱ�Ϊ�������͵Ľ��ϵ��;
r1,r2�D�ֱ�Ϊ�������ڡ���ԲͲ�İ뾶;
ui�D�ֱ�Ϊ�������������в��ֺ����Һ�沿�ֵĸ߶ȡ�
������Ψ�жȿƼ�����˾http://wydkj.51dzw.com/
JBXFD2G06MSSDSMR��������ʽλ�ƴ���������������������״���������Լ���λ����,�����ֻ���������λ�ơ������Լ���������ϵ���ȡ�����λ�Ʒ�Χ���Դ�0~1mm��0~500 mm,�ֱ��ʿ��������Χ��0.1%��
��ͬ������ͬ����,��ͬ������ͬ���������ڲ�����λ�Ƶı�ѹ��ʽ��������
��ͬ����,��ͬ�����Ĺ����빤��ԭ��,��ͬ�����DZ��������ת��ѹ�����ļ���ͬ�����Ľṹʾ��ͼ��ͼ9-52(a)��ʾ��
�����ĸ����Ķ��Ӻ�һ������������������״��ת����ɡ��ڶ����ĸ����ϵ���ֻ������ͬ����Ȧ���ӳɳ�������,������ֻ������ͬ����Ȧ���ӳɴμ����顣��Ȧ�Ĵ��ӷ�����ͼ9-52(b)��ʾ��
ͼ9-52 ��ͬ�����ṹʾ�⼰����ͼ,�ٶ������ĸ����ϵij������鵥����Ȧ�����á�1��ʾ,�μ����鵥����Ȧ������u2��ʾ�����������鼤��ʱ,�ڸ������ϲ����Ĵ�ͨΪ��1����2����3����4����1��3��2��4����Դż���,��ͨ������һ�µ�,ͼ9-52�м�ͷ�����ʾ��Щ��ͨ��ijһ˲ʱ��������ת��ת��ʱ,����ı仯������μ������и����綯�Ƶı仯���ĶԳ��μ���Ȧ�������ĸ���ѹ����
�ڳ�ʼλ�æ�=0��ʱ,ת�ӵ�ÿ��������ס�˶��Ӽ���һ�롣��ʱ,�ĸ����Ӽ��Ĵ�·���Գ�,���,ͨ�������ĸ����Ĵ�ͨ��С�����,����l=��2=��3=��4�������ĸ��μ���Ȧ�и������ƶ����,�����ڴμ���Ȧ1��3��2��4����,��������ѹΪ�㡣
��ת��˳ʱ��ת��һ���Ƕ�+��ʱ,2��4������Ը����������,��1��3������Ը��������С�����2��4�������С��ͨ����,�μ���Ȧ2��4�����綯������;�෴,1��3�����������ͨ��С,�μ���Ȧ1��3��Ӧ���Ƽ�С�����,�ܵ������ѹ����Ϊ��,������ѹ��2��4��Ȧ�и�Ӧ����ͬ��,����˳ʱ��ת�Ǧ������ȡ�
��ת�ӷ�ʱ��ת��һ���ǶȨD��ʱ,�����ǰ���෴,��Ȧ1��3�ĸ����綯�Ʊ���Ȧu0�D������Ƶ��;
Eu�D������ѹ��ֵ��
��ʽ(9-22)���Կ���,�����ѹ�ǵ�����,���ֵ�ı仯��Ӧ�˽�λ�Ƶı仯��
�ڽ��н�λ�Ʋ���ʱ,һ�����һ�Խṹ���в���ͬ�������ͬ��ϵͳ,��ͼ9-55��ͬ����ϵͳ��,һ��ͬ������Ϊ��λ�ƴ�����,���Ʒ��ͻ�;��һ��ͬ������Ϊ��¼װ��,���ƽ��ջ���
��ͬһ������ѹ����ϵͳ�е�����ת��,�����ͻ�ת��ת��ijһλ��,�䶨�����齫�����Ӧ�ĸ�Ӧ�綯��,����Щ��Ӧ�綯�Ƽӵ����ջ���Ӧ�Ķ�����Ȧ��,ʹ���ջ���ת����һ��ת�ص����ö�ת����ֱ�����ջ�ͬ����ϵͳ��,���ݽ��ջ�ת�ӵ�ת�ǾͿ��ж����ͻ��Ľ�λ�ơ�
ͬ�����ɲ��λ�Ƶķ�ΧΪ360��,����Ϊ��0.5%,���ȡ�0.1��~��0.7�㡣���ڼ���Ƶ�ʳ���40 Hz��400 Hz��������ͬ�����Ķ�̬��Ӧ����,����,ת��ת������Ҳ�����䶯̬��Ӧ������̫��,һ�����ת��1200r/min�½��в�����
Һλ������������,����ʽҺλ������,����ʽҺλ�������ڷɻ��ϵĵ���Ӧ�þ��ǵ���ʽ������,���Բ����ɻ�������ȼ�͵Ĵ���������ʽ�������ĺô�����ȫȡ���˻�е��������,�ṹ�������С,���ڽ��������������ĸ�������װ��һ��������,�ڲ�������ʱ,�ܼ��ٷɻ���б����ʱ�����
����ʽ������ʵ������ͨ������������ȼ��(ú�ͻ�����)��Һ��λ�ö���Ӳ��ȼ�͵Ĵ�����ͼ9-56��һ�ֵ���ʽ��������ԭ��ͼ��ͼ�����Ϊ����ͬ�Ľ���ԲͲ(����н����Ʋ������Ͳ)��ɵ�����,��������ֱ�ز���������,����������һ���ֽ�������,����ij����������Ķ��ٶ��䡣���������ϰ벿�������,��˵������н������к����Һ�沿�ּ����Ľ��ʲ�ͬ,��һ������,��һ�ǿ����������Ļ����(�����ڿ���),����һ�����ʱ仯�͵ĵ���ʽ���������ܵĵ�����CxΪ2t��oFr=r22t(er-��o)(9-23)
ʽ�� eO,erһ�ֱ�Ϊ�������͵Ľ��ϵ��;
r1,r2�D�ֱ�Ϊ�������ڡ���ԲͲ�İ뾶;
ui�D�ֱ�Ϊ�������������в��ֺ����Һ�沿�ֵĸ߶ȡ�
������Ψ�жȿƼ�����˾http://wydkj.51dzw.com/
 ��ؼ�������
��ؼ�������- 6-6ȫ��CMOSͼ��������SC1400ME
- 6-6100G/200G SerDes�ӿڼ�����װ��ѧģ�飨CPO��
- 6-6��Բ����оƬģ�飨WMCM��оƬ��װ����
- 6-62nm ���ռ�ȫ�·�װ����ƻ�� A20 оƬ̽��
- 6-6����Arm CPU + Blackwell GPUӦ�����
- 6-6Lunar Lake�ܹ�������������������
- 6-5ConnectX-8 SuperNICs����B30о
- 6-5��һ��LVDT/RVDT/Resolver ������Ӧ������
- 6-5��PXI & PXIe ������ת��ѹ�� 41-670 ϵ��
- 6-5�����ӳ�HID�����������ݴ��䣨HDT��Ӧ�ù��ܽ���
- 6-5���� HDT��������������Ӧ��̽��
- 6-5��̬﮵�ؽ���������ʪ��Nano-wetting���·������
�������
- AM29DL163DB90PCI ����ʧ�ٺ�
- SKT520/20E ����̬����������߹���
- 43045-1000 �ɻ��Ĺ�ת���غ�ƫ����
- Z0109MNT1G �������������·
- PU9104/01Tģ��ת����4������
- PQ60018EGL25NKS ǣ���ɻ�����
- SG73P2BTTD3000F ���������
- K6R4008V1C-TC20 ˮ��ʪʽ���
- ma4p504-1072-30�����۶�������
- TPS76428DRAM�ڲ���ˢ�¿��Ƽ���ʱ
�Ƽ���������

- ��ѩ��������
- ������һ��dz���Ȥ��ͬʱ����һ�������Ѷȵ��淨��EDE2116AB... [��ϸ]
- ȫ��CMOSͼ��������SC1400ME
- 100G/200G SerDes�ӿڼ�����װ
- ��Բ����оƬģ�飨WMCM��оƬ��װ����
- 2nm ���ռ�ȫ�·�װ����ƻ�� A20 оƬ
- ����Arm CPU + Blackwell
- Lunar Lake�ܹ�������
- ��ý��Э������SM501��Ƕ��ʽϵͳ�е�Ӧ��
- ����IEEE802.11b��EPA�¶ȱ�����
- QUICCEngine�������ƶ�IP�������
- SoC���������IJ�ҵ����
- MPC8xxϵ�д�������Ƕ��ʽϵͳ��Դ���
- dsPIC�����ڽ�����Ƶ�����е�Ӧ���о�
 ��������44030402000607
��������44030402000607





