
传感器模型设计
发布时间:2015/5/17 16:59:58 访问次数:701
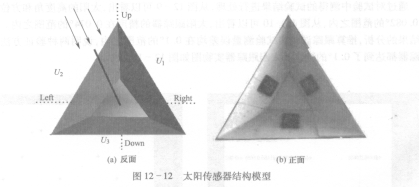
基于比较控制式太阳跟踪器的思想设计了一种低成本、简易实用的太阳跟踪器。设计的KAR00052太阳传感器由三块硅光电池组成,按照Y形布局,附着在如图12 - 12(a)所示的梯台内壁上,形成如图12 - 12(b)所示传感器。各硅光电池法线方向与太阳传感器的对称轴成相同角度,角度范围为300~ 600,这里为480,三块硅光电池的负极共地,正极为输出端。
固定太阳传感器时,它的Up - Down轴线应与云台的纵轴重合,Left - Right轴线与云台的横轴重合。从数学上来说,太阳昀位置可以明确地由两个角度卢和y表示。p是太阳的横向角,y是太阳的纵向角。太阳传感器的横向角和纵向角分别为Ps和Ys,当太阳传感器对准太阳时,Ps =P,ys=y;如果太阳传感器没有对准太阳时,太阳传感器就会产生一组偏差信号AX和△y.
根据设计的太阳传感器,建立二维坐标系如图12 - 13(a)所示,三片硅光电池的输出电压分别为Ul、U2、U3且成1200的夹角。将这组输出电压在二维坐标系上进行合成,所得到的矢量和U就是太阳传感器未对准太阳时的偏差信号,如图12 - 13(b)所示。
将这组输出电压在二维坐标系中进行分解,如图12 - 13(c)所示,可以分别得到反映太阳偏转方向的一组正交的偏差信号AX和AY。其中,AX反映了纵向角的偏差,AY反映了横向角的偏差。
基于比较控制式太阳跟踪器的思想设计了一种低成本、简易实用的太阳跟踪器。设计的KAR00052太阳传感器由三块硅光电池组成,按照Y形布局,附着在如图12 - 12(a)所示的梯台内壁上,形成如图12 - 12(b)所示传感器。各硅光电池法线方向与太阳传感器的对称轴成相同角度,角度范围为300~ 600,这里为480,三块硅光电池的负极共地,正极为输出端。
固定太阳传感器时,它的Up - Down轴线应与云台的纵轴重合,Left - Right轴线与云台的横轴重合。从数学上来说,太阳昀位置可以明确地由两个角度卢和y表示。p是太阳的横向角,y是太阳的纵向角。太阳传感器的横向角和纵向角分别为Ps和Ys,当太阳传感器对准太阳时,Ps =P,ys=y;如果太阳传感器没有对准太阳时,太阳传感器就会产生一组偏差信号AX和△y.
根据设计的太阳传感器,建立二维坐标系如图12 - 13(a)所示,三片硅光电池的输出电压分别为Ul、U2、U3且成1200的夹角。将这组输出电压在二维坐标系上进行合成,所得到的矢量和U就是太阳传感器未对准太阳时的偏差信号,如图12 - 13(b)所示。
将这组输出电压在二维坐标系中进行分解,如图12 - 13(c)所示,可以分别得到反映太阳偏转方向的一组正交的偏差信号AX和AY。其中,AX反映了纵向角的偏差,AY反映了横向角的偏差。
 相关技术资料
相关技术资料- 5-17传感器模型设计

 公网安备44030402000607
公网安备44030402000607





