

将检测嚣和长1m的竖直杆安装在跟踪器的机械装置上
发布时间:2015/5/17 16:56:20 访问次数:645
将检测嚣和长1m的竖直杆安装在跟踪器的机械装置上,使其保持与水平面垂直,设备置KAR00044C于太阳光下。当跟踪器确定太阳位置时,通过测量竖直杆产生的阴影长度的方法验证跟踪精度。设影子长度为^,则有跟踪误差角度要达到0. 10的精度,^的取值范围应大于1. 5mm。
此外,通过PSD输出的vx、L电压值也可以得到一组推算跟踪误差。即PSD在偏离中心时,每偏差1斗m产生ImV电压,实验测得当跟踪上太阳时,产生的电压偏差在0.01―0.05V或者-0. 05-0. 01V,PSD感受太阳光的位移最小为10 p.m,0.OIV时对应PSD偏离中心的距离为lOym,满足PSD感受太阳光强的最小位移lOym的要求。遮光筒的高度为35mm,由于跟踪上太阳时PSD产生的最大电压偏差控制在对应偏离PSD的中心距离为501.tm,所以跟踪
的精度为可以推算已经达到0. 10的精度要求。
通过以上两种方法可验证太阳跟踪器的精度要求。根据图12 -8
所示太阳成像简图进行验证视场角度为±120。设检测精度为d,设高度为日,有a= arctan箸,要求a≤0.10,且PSD感受太阳光强的最小位移缸= 10 htm,则o=arctan管)=arctan(等)辱o.10,从而有Ⅳ=5. 729mm。取日=35mm,则检测精度为a=arctan(箸)=arctan(蠹‰).=o.0170,设视场角庋为2a,光电检测器的半径为r,光电检测器直径为2r= 15mm,a =arctan(寺),则有o=arctan(古)=arctan(等)=120,即视场角度为±120,合计240。
将检测嚣和长1m的竖直杆安装在跟踪器的机械装置上,使其保持与水平面垂直,设备置KAR00044C于太阳光下。当跟踪器确定太阳位置时,通过测量竖直杆产生的阴影长度的方法验证跟踪精度。设影子长度为^,则有跟踪误差角度要达到0. 10的精度,^的取值范围应大于1. 5mm。
此外,通过PSD输出的vx、L电压值也可以得到一组推算跟踪误差。即PSD在偏离中心时,每偏差1斗m产生ImV电压,实验测得当跟踪上太阳时,产生的电压偏差在0.01―0.05V或者-0. 05-0. 01V,PSD感受太阳光的位移最小为10 p.m,0.OIV时对应PSD偏离中心的距离为lOym,满足PSD感受太阳光强的最小位移lOym的要求。遮光筒的高度为35mm,由于跟踪上太阳时PSD产生的最大电压偏差控制在对应偏离PSD的中心距离为501.tm,所以跟踪
的精度为可以推算已经达到0. 10的精度要求。
通过以上两种方法可验证太阳跟踪器的精度要求。根据图12 -8
所示太阳成像简图进行验证视场角度为±120。设检测精度为d,设高度为日,有a= arctan箸,要求a≤0.10,且PSD感受太阳光强的最小位移缸= 10 htm,则o=arctan管)=arctan(等)辱o.10,从而有Ⅳ=5. 729mm。取日=35mm,则检测精度为a=arctan(箸)=arctan(蠹‰).=o.0170,设视场角庋为2a,光电检测器的半径为r,光电检测器直径为2r= 15mm,a =arctan(寺),则有o=arctan(古)=arctan(等)=120,即视场角度为±120,合计240。
 相关技术资料
相关技术资料- 5-17将检测嚣和长1m的竖直杆安装在跟踪器的机械装置上
热门点击
- 计算机网络上的通信面临的威胁可分为两大类
- 菲涅耳半波带法
- 计数测频法
- 控制器利用MCU的PWM功能对胶体铅酸蓄电池
- 仪器的静态特性指标
- 照明质量技术指标
- 分组交换在传送数据之前不必先占周一条端到端的
- 电荷的注入和检测
- 响应时间
- 相对阈值增量与显示能力RP的关系
推荐技术资料
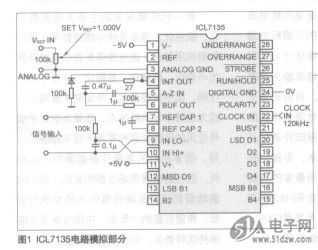
- 自制智能型ICL7135
- 表头使ff11CL7135作为ADC,ICL7135是... [详细]
 公网安备44030402000607
公网安备44030402000607





