

图像分割程序
发布时间:2014/7/8 21:35:09 访问次数:984
阈值处理是一种区域分割方法。 AWT6112R使用阈值进行图像分割时,所有灰度值大于或等于某一阈值的像素被判为目标,所有灰度值小于该阈值的像素被排除在目标之外。如果目标内部具有均匀一致的灰度值,并且目标处于具有均匀灰度值的背景中,目标与背景有比较强的对比时,使用阈值方法效果比较好。
图13-11所示的程序中,用IMAQ ReadFile VI读取一幅图像,用IMAQ Histograph VI做图像的灰度直方图分析,在灰度直方图上找到区分背景和目标的灰度阈值以后,将此阈值提供给IMAQ Threshold VI对图像进行分割。域值函数IMAQ Threshold VI在ImageProcessing―Processing函数予选板中,它的Range(阈值范围)参数是一个簇,簇的元素分别是:
Lower value:最小灰度值,其默认值为128。
Upper value:最大灰度值,其默认值为255。
具有最小灰度值和最大灰度值之间灰度的图像部分作为目标被分割。
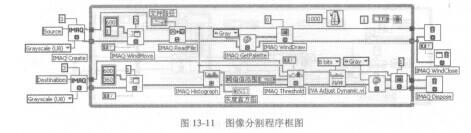
图像分割以后为了充分利用整个图像的动态范围,用IVA Adjust Dynamic VI重新分市图像像素值。文件名带有“IVA”的一族VI是LabVIEW的Vision Assistant附带的VI,用Vision Assistant自动生成的程序经常调用这一族VI,它们NationalInstrumentsWision
Assistant 8.2.1\CG目录的IVA Templates LV82-Vision82.llb库中。
边缘分割。
图像边缘是两个具有不同灰度的均匀区域的边界,是图像中相邻像素灰度值比较大的突然改变。边缘中包含的信息可以用于图像分析和目标识别,是图像的基本特征和判别物体的重要依据。边缘检测的质量直接关系到测试结果的精确程度。
NI Vision检测边缘的基本方法是沿着一个一维剖面检测像素灰度值的变化量。这个一维剖面即检测线。NI Vision提供简单边缘检测和高级边缘检测两种方法。执行简单边缘检测时,沿着检测线逐个像素进行扫描,按设定的阈值加减一个滞后量确定边缘位置。高级边缘检测方法用各个点像素值与它前后点像素值的平均值作为确定边缘的条件。高级边缘检测的steepness参数是分析点以后的取值范围,用来设定预期的边缘过渡区。
阈值处理是一种区域分割方法。 AWT6112R使用阈值进行图像分割时,所有灰度值大于或等于某一阈值的像素被判为目标,所有灰度值小于该阈值的像素被排除在目标之外。如果目标内部具有均匀一致的灰度值,并且目标处于具有均匀灰度值的背景中,目标与背景有比较强的对比时,使用阈值方法效果比较好。
图13-11所示的程序中,用IMAQ ReadFile VI读取一幅图像,用IMAQ Histograph VI做图像的灰度直方图分析,在灰度直方图上找到区分背景和目标的灰度阈值以后,将此阈值提供给IMAQ Threshold VI对图像进行分割。域值函数IMAQ Threshold VI在ImageProcessing―Processing函数予选板中,它的Range(阈值范围)参数是一个簇,簇的元素分别是:
Lower value:最小灰度值,其默认值为128。
Upper value:最大灰度值,其默认值为255。
具有最小灰度值和最大灰度值之间灰度的图像部分作为目标被分割。
图像分割以后为了充分利用整个图像的动态范围,用IVA Adjust Dynamic VI重新分市图像像素值。文件名带有“IVA”的一族VI是LabVIEW的Vision Assistant附带的VI,用Vision Assistant自动生成的程序经常调用这一族VI,它们NationalInstrumentsWision
Assistant 8.2.1\CG目录的IVA Templates LV82-Vision82.llb库中。
边缘分割。
图像边缘是两个具有不同灰度的均匀区域的边界,是图像中相邻像素灰度值比较大的突然改变。边缘中包含的信息可以用于图像分析和目标识别,是图像的基本特征和判别物体的重要依据。边缘检测的质量直接关系到测试结果的精确程度。
NI Vision检测边缘的基本方法是沿着一个一维剖面检测像素灰度值的变化量。这个一维剖面即检测线。NI Vision提供简单边缘检测和高级边缘检测两种方法。执行简单边缘检测时,沿着检测线逐个像素进行扫描,按设定的阈值加减一个滞后量确定边缘位置。高级边缘检测方法用各个点像素值与它前后点像素值的平均值作为确定边缘的条件。高级边缘检测的steepness参数是分析点以后的取值范围,用来设定预期的边缘过渡区。
 相关技术资料
相关技术资料- 7-8图像分割程序
热门点击

 公网安备44030402000607
公网安备44030402000607





