
数字集成电路的延迟时间
发布时间:2013/9/12 19:47:37 访问次数:7064
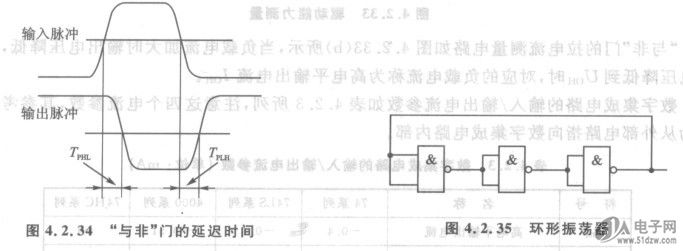
一个门电路的输入端状态发生变化时,TLP121(GB-TPL)会引起输出端的状态变化,由于内部电路状态变化需要一定的时间,因此输出端的变化总是要比输入端的变化延迟一段时间。如图4.2. 34所示,衡量一个“与非”门延迟时间的参数有TPLH和TPHL。
将TPLH和TPHL的算术平均值称为平均传输延迟时间TPD,即TPD一(TPHL+TPLH)/2。
从74LSOO的参数表中可知,TPLH、TPHL的值为4~15 ns,直接测量时对示波器的频率特性要求较高,普通示波器不易测出。需要测量时将奇数个“与非”门串接起来,形成一个环形振荡器,测量振荡器的频率厂,就可换算出TPD。
如图4.2. 35所示,三个相同的与“与非”串接,可以认为三个门的延迟时间相同,通过测量振荡器输出波形的周期T,即可得到与“与非”的延迟时间TPD―T/6。
图4.2. 34“与非”门的延迟时间
在实际应用电路中,负载的特性对门电路的延迟时间会产生影响,参数表中给出的数据是在负载电阻RL为2kQ,负载电容CI.为50 pF条件下测得的。负载电阻和电容数僮增大都会使延迟时间增长。

当系统工作的频率较低(如低于1MHz)时,器件的延迟时间相对于信号频率很小,可以忽略不计。但是系统频率较高时器件的延迟时间有可能造成系统工作紊乱。不同类型的数字集成电路的延迟时间有较大的差别,如4000系列的延迟时间比较长,选用器件时首先必须根据系统的工作频率来选择器件的种类。表4.2.4为常见数字集成电路的最高工作频率。
一个门电路的输入端状态发生变化时,TLP121(GB-TPL)会引起输出端的状态变化,由于内部电路状态变化需要一定的时间,因此输出端的变化总是要比输入端的变化延迟一段时间。如图4.2. 34所示,衡量一个“与非”门延迟时间的参数有TPLH和TPHL。
将TPLH和TPHL的算术平均值称为平均传输延迟时间TPD,即TPD一(TPHL+TPLH)/2。
从74LSOO的参数表中可知,TPLH、TPHL的值为4~15 ns,直接测量时对示波器的频率特性要求较高,普通示波器不易测出。需要测量时将奇数个“与非”门串接起来,形成一个环形振荡器,测量振荡器的频率厂,就可换算出TPD。
如图4.2. 35所示,三个相同的与“与非”串接,可以认为三个门的延迟时间相同,通过测量振荡器输出波形的周期T,即可得到与“与非”的延迟时间TPD―T/6。
图4.2. 34“与非”门的延迟时间
在实际应用电路中,负载的特性对门电路的延迟时间会产生影响,参数表中给出的数据是在负载电阻RL为2kQ,负载电容CI.为50 pF条件下测得的。负载电阻和电容数僮增大都会使延迟时间增长。
当系统工作的频率较低(如低于1MHz)时,器件的延迟时间相对于信号频率很小,可以忽略不计。但是系统频率较高时器件的延迟时间有可能造成系统工作紊乱。不同类型的数字集成电路的延迟时间有较大的差别,如4000系列的延迟时间比较长,选用器件时首先必须根据系统的工作频率来选择器件的种类。表4.2.4为常见数字集成电路的最高工作频率。
上一篇:TTL电路的驱动能力
上一篇:石英晶体的检测
 相关技术资料
相关技术资料- 9-12数字集成电路的延迟时间
热门点击
- 数字集成电路的延迟时间
- 利用示波器的X-Y功能进行测量
- HCMOS方波发生器电路
- 电动机的单按钮启/停控制
- 电气隔离I2C总线电路
- PROFIBUS总线连接器
- 自制的用于焊接片状元器件的固定夹具
- 用传统继电接触式控制方式实现三相交流异步电动
- 普通发光二极管工作原理和主要参数解说
- 直流稳压电路中的取样电阻电路
推荐技术资料

- 循线机器人是机器人入门和
- 循线机器人是机器人入门和比赛最常用的控制方式,E48S... [详细]
 公网安备44030402000607
公网安备44030402000607





