
X射线检测仪控制系统
发布时间:2012/8/11 19:29:33 访问次数:920
X射线检测仪控制系统由运12061A330JAT2A动控制单元A、运动控制单元B、高压控制单元和面板控制单元4个单元组成,如图8-7所示。
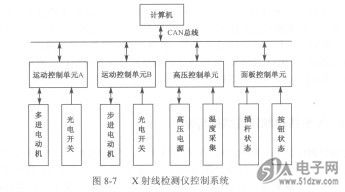
其中,计算机搭载整个控制系统的操作界面,负责发送控制命令和接收各个控制单元的状态信息,以便监控整个系统的运行状态;运动控制单元A负责控制载物台X方向步进电动机与光管上下步进电动机的运行,以及光电开关信号采集;运动控制单元B负责控制载物台,方向步进电动机与图像增强器步进上下步进电动机的运行,以及光电开关信号采集;高压控制单元负责对X光管高压电源进行控制,以及X光管环境温度的采集;面板控制单元则负责采集运动摇杆、控制按钮的状态信息,以及控制载物台旋转。
X射线检测仪控制系统各个单元在微控制器( MCU)的控制下完成各自功能。
CAN总线是一种有效支持分布式控制或实时控制的串行通信网络。由于CAN总线具有通信速率高、开放性好、报文短、纠错能力强、控制简单、扩展能力强及系统成本低等特点,越来越受到人们的关注,应用的领域也越来越广,所以一般选用CAN总线作为整个控制系统的总线。
采用隔离技术可进一步提高控制系统的稳定性和抗干扰能力。
CAN节点一般由CAN控制器或CAN接口芯片和总线驱动器构成,具体有3种构成型式。
(1)独立CAN通信控制器和驱动器构成。
(2)带控制功能的I/O器件和CAN驱动器构成。
(3) CAN微控制器和CAN驱动器构成。而第(3)种形式应用较广,有利于简化电路设计,在冗余设计时便于程序控制。
1)运动控制卓元
步进电动机是一种将电脉冲转化为角位移的执行机构,可以通过控制脉冲个数来控制角位移量,从而达到精确定位的目的;同时可以通过控制脉冲频率来控制电动机转动的速度和加速度,从而达到调速的目的。X射线检测仪共有4个步进电动机,分别控制载物台的二维移动、X射线管上下移动,以及图像增强器和X射线CCD成像器的上下移动,它们是整个检测系统的运动完成单元,所以步进电动机的驱动至关重要。
2)高压控制单元
X射线源的控制实质上是控制X射线管的管电压和灯丝电流,也就是控制管电压高压电源和灯丝电流电源。
3)软件设计
X射线检测仪控制系统是在微控制器( MCU)基础上进行开发的,其软件设计也就是对微控制器( MCU)进行程序编写。X射线检测仪控制系统由4个单元组成,所以系统软件设计则是对这4个单元MCU进行程序编写。
从各个单元实现功能来分析运动控制单元和高压控制单元通过CAN总线接收计算机的控制命令,面板控制单元通过CAN总线来发送摇杆与按钮状态信息给计算机,因此程序编写可以分为数据接收和数据发送两种模式。数据接收模式是指微控制器( MCU)不会主动发出控制指令,只有通过CAN总线接收到计算机控制指令后,才会进行相关操怍。
X射线检测仪控制系统由运12061A330JAT2A动控制单元A、运动控制单元B、高压控制单元和面板控制单元4个单元组成,如图8-7所示。
其中,计算机搭载整个控制系统的操作界面,负责发送控制命令和接收各个控制单元的状态信息,以便监控整个系统的运行状态;运动控制单元A负责控制载物台X方向步进电动机与光管上下步进电动机的运行,以及光电开关信号采集;运动控制单元B负责控制载物台,方向步进电动机与图像增强器步进上下步进电动机的运行,以及光电开关信号采集;高压控制单元负责对X光管高压电源进行控制,以及X光管环境温度的采集;面板控制单元则负责采集运动摇杆、控制按钮的状态信息,以及控制载物台旋转。
X射线检测仪控制系统各个单元在微控制器( MCU)的控制下完成各自功能。
CAN总线是一种有效支持分布式控制或实时控制的串行通信网络。由于CAN总线具有通信速率高、开放性好、报文短、纠错能力强、控制简单、扩展能力强及系统成本低等特点,越来越受到人们的关注,应用的领域也越来越广,所以一般选用CAN总线作为整个控制系统的总线。
采用隔离技术可进一步提高控制系统的稳定性和抗干扰能力。
CAN节点一般由CAN控制器或CAN接口芯片和总线驱动器构成,具体有3种构成型式。
(1)独立CAN通信控制器和驱动器构成。
(2)带控制功能的I/O器件和CAN驱动器构成。
(3) CAN微控制器和CAN驱动器构成。而第(3)种形式应用较广,有利于简化电路设计,在冗余设计时便于程序控制。
1)运动控制卓元
步进电动机是一种将电脉冲转化为角位移的执行机构,可以通过控制脉冲个数来控制角位移量,从而达到精确定位的目的;同时可以通过控制脉冲频率来控制电动机转动的速度和加速度,从而达到调速的目的。X射线检测仪共有4个步进电动机,分别控制载物台的二维移动、X射线管上下移动,以及图像增强器和X射线CCD成像器的上下移动,它们是整个检测系统的运动完成单元,所以步进电动机的驱动至关重要。
2)高压控制单元
X射线源的控制实质上是控制X射线管的管电压和灯丝电流,也就是控制管电压高压电源和灯丝电流电源。
3)软件设计
X射线检测仪控制系统是在微控制器( MCU)基础上进行开发的,其软件设计也就是对微控制器( MCU)进行程序编写。X射线检测仪控制系统由4个单元组成,所以系统软件设计则是对这4个单元MCU进行程序编写。
从各个单元实现功能来分析运动控制单元和高压控制单元通过CAN总线接收计算机的控制命令,面板控制单元通过CAN总线来发送摇杆与按钮状态信息给计算机,因此程序编写可以分为数据接收和数据发送两种模式。数据接收模式是指微控制器( MCU)不会主动发出控制指令,只有通过CAN总线接收到计算机控制指令后,才会进行相关操怍。
上一篇:X射线检测仪
上一篇:X射线检测仪的工作原理
 相关技术资料
相关技术资料- 8-11X射线检测仪控制系统
热门点击
- X射线检测仪的工作原理
- FET的电路符号
- BTL电路的原理
- AM广播与FM广播的特征
- 带自举的OTL甲乙类互补对称功率放大电路
- 反馈式正弦波振荡器的工作原理
- 反射式检流计
- 高频电功率测量仪表
- 多级放大器静态、动态特性的测试与分析
- 垂直轴、水平轴的位置调节
推荐技术资料

- 循线机器人是机器人入门和
- 循线机器人是机器人入门和比赛最常用的控制方式,E48S... [详细]
 公网安备44030402000607
公网安备44030402000607





