
系统架构
发布时间:2012/4/3 0:53:16 访问次数:1761
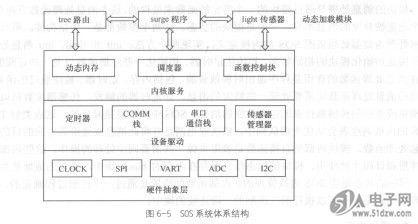
SOS的体系结构分为4层:硬件抽象层、设备驱动层、内核层和TSUMU38BF-LF动态模块层。硬件抽象层提供与mica2、Ubicell等硬件的虚拟接口,如UART、clock等,设备驱动提供设备驱动信息,如sensordriver等,内核(blank)提供内核服务,读取上层模块信息,并与底层进行交互等,SOS动态模块信息供用户开发应用程序,动态装载到SOS内核上。
SOS由动态加载的模块和静态内核组成,如图6-5所示。静态内核可以先烧写到节点上,节点运行过程中用户还可以根据任务的需要动态地增删模块。静态内核实现了最基本的服务,包括底层硬件抽象、灵活的优先级消息调度器、动态内存分配等功能。模块实现了系统大多数的功能,包括驱动程序、协议、应用程序等。这些模块都是独立的,对模块的修改不会中断系统的操作。
SOS为上层应用程序的设计提侠了丰富的API,如读取面板信息、时钟计时、网络传输等。利用这些API,便可以组织成功能强大的应用程序。
SOS在设计的时候,除了考虑传统的嵌入式系统本身有的技术,内核还提供了动态连接模块,优先级序列表,以及动态内存管理的子系统。内核提供的这些服务可以帮助用户在一般配置后进行修改。大部分传感器网络的应用和网络协议都发生在以内核为中心的模块之间。一个路由协议和一个传感器模块就可以组成一个最小的、最简单的传感器网络应用结构。
SOS支持简单的模块间的分发并且可以在系统运行时删除或者添加模块。TinyOS可以分发系统镜像并且通过Deluge来重新更新节点的程序。Bombilla Virtual Machine可以通过Trickle协议来运行或者传递新的程序。相对TinyOS而言,TinyOS要运行Deluge才可以交互,而SOS可以通过公共内核使模块间相互交互。相对Bombilla Virtual Machine而言,SOS内存
占用的较少。另外,SOS里RAM的使用分成两个部分,一部分是SOS的内核CORE,另外一部分是动态内存池占用的。
SOS的体系结构分为4层:硬件抽象层、设备驱动层、内核层和TSUMU38BF-LF动态模块层。硬件抽象层提供与mica2、Ubicell等硬件的虚拟接口,如UART、clock等,设备驱动提供设备驱动信息,如sensordriver等,内核(blank)提供内核服务,读取上层模块信息,并与底层进行交互等,SOS动态模块信息供用户开发应用程序,动态装载到SOS内核上。
SOS由动态加载的模块和静态内核组成,如图6-5所示。静态内核可以先烧写到节点上,节点运行过程中用户还可以根据任务的需要动态地增删模块。静态内核实现了最基本的服务,包括底层硬件抽象、灵活的优先级消息调度器、动态内存分配等功能。模块实现了系统大多数的功能,包括驱动程序、协议、应用程序等。这些模块都是独立的,对模块的修改不会中断系统的操作。
SOS为上层应用程序的设计提侠了丰富的API,如读取面板信息、时钟计时、网络传输等。利用这些API,便可以组织成功能强大的应用程序。
SOS在设计的时候,除了考虑传统的嵌入式系统本身有的技术,内核还提供了动态连接模块,优先级序列表,以及动态内存管理的子系统。内核提供的这些服务可以帮助用户在一般配置后进行修改。大部分传感器网络的应用和网络协议都发生在以内核为中心的模块之间。一个路由协议和一个传感器模块就可以组成一个最小的、最简单的传感器网络应用结构。
SOS支持简单的模块间的分发并且可以在系统运行时删除或者添加模块。TinyOS可以分发系统镜像并且通过Deluge来重新更新节点的程序。Bombilla Virtual Machine可以通过Trickle协议来运行或者传递新的程序。相对TinyOS而言,TinyOS要运行Deluge才可以交互,而SOS可以通过公共内核使模块间相互交互。相对Bombilla Virtual Machine而言,SOS内存
占用的较少。另外,SOS里RAM的使用分成两个部分,一部分是SOS的内核CORE,另外一部分是动态内存池占用的。
 相关技术资料
相关技术资料- 4-3系统架构

 公网安备44030402000607
公网安备44030402000607





