
最坏与最佳情况覆盖
发布时间:2012/3/30 20:13:45 访问次数:1730
最坏与最佳情况覆盖算法同时 A6H-8102-P属于确定性网络路径/目标覆盖和栅栏覆盖类型,算法考虑如何对穿越网络的目标或其所在路径上各点进行感应与追踪,体现了一种网络的覆盖性质。Meguerdichian等定义了“最大突破路径”(Maximal Breach Path)和“最大支撑路径”(MaximalSupport Path),分别使得路径上的点到周围最近传感器的最小距离最大化及最大距离最小化。显然,这两种路径分别代表了无线传感器网络最坏(不被检测概率最小)和最佳(被发现的概率最大)的覆盖情况。文中分别采用计算几何中的Voronoi图与Delaunay三角形来完成最大突破路径和最大支撑路径的构造和查找。其中,Voronoi图是由所有Delaunay兰角形边上的垂直平分线形成;而Delaunay三角形的各顶点为网络的传感器节点,并满足子三角形外接圆中
不含其他节点,如图3-23所示。
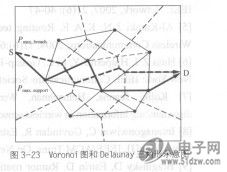
由于Voronoi图中的线段具有到最近的传感器节点距离最大的性质,因此最大突破路径一定是由Voronoi图中的线段组成。
最坏与最佳情况覆盖算法同时 A6H-8102-P属于确定性网络路径/目标覆盖和栅栏覆盖类型,算法考虑如何对穿越网络的目标或其所在路径上各点进行感应与追踪,体现了一种网络的覆盖性质。Meguerdichian等定义了“最大突破路径”(Maximal Breach Path)和“最大支撑路径”(MaximalSupport Path),分别使得路径上的点到周围最近传感器的最小距离最大化及最大距离最小化。显然,这两种路径分别代表了无线传感器网络最坏(不被检测概率最小)和最佳(被发现的概率最大)的覆盖情况。文中分别采用计算几何中的Voronoi图与Delaunay三角形来完成最大突破路径和最大支撑路径的构造和查找。其中,Voronoi图是由所有Delaunay兰角形边上的垂直平分线形成;而Delaunay三角形的各顶点为网络的传感器节点,并满足子三角形外接圆中
不含其他节点,如图3-23所示。
由于Voronoi图中的线段具有到最近的传感器节点距离最大的性质,因此最大突破路径一定是由Voronoi图中的线段组成。
上一篇:轮换活跃/休眠节点的Self-Schedul.ng覆盖协议
上一篇: 无线传感器网络定位技术
 相关技术资料
相关技术资料- 3-30最坏与最佳情况覆盖
- 相关IC型号
- A6H-8102-P
- 暂无最新型号
 公网安备44030402000607
公网安备44030402000607





