
数字PID参数整定
发布时间:2011/10/8 9:51:37 访问次数:1877
理论和实践都表明,PID控制器的KP、T1、TD各参数与系统的动态和稳态性能关系密切,都起着重要作用。 OB2263AP
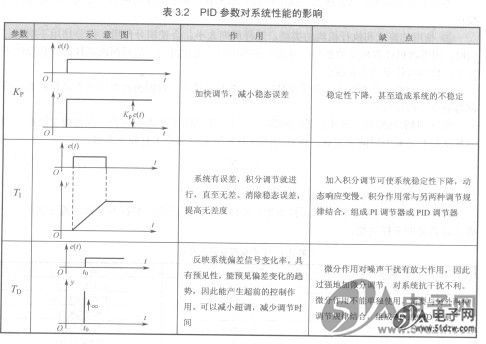
1.比例系数KP对系统性能的影响
(1)对动态性能的影响
比例系数KP太小,系统动作缓慢;比例系数KP增大使系统动作灵敏,加快调节速度,但Kp偏大,容易引起系统振荡,反而使调节时间加长,甚至使系统不稳定。
(2)对静态性能的影响
在系统稳定的前提下,加大比例系数KP可以减小静差,提高控制精度,但不能完全消除静差。
2.积分时间常数T1对系统性能的影响
积分控制常与比例和微分控制共同作用,构成PI控制器或PID控制器。
(1)对动态性能的影响
积分时间常数乃太大,积分作用对系统的影响减小,系统响应速度变慢:减小积分时间常数死,系统响应变快,但振荡次数增多,T1偏小,系统振荡加剧,容易使系统不稳定。选择合适的兀值,可使系统的过渡特性比较理想。
(2)对静态性能的影响
只要有足够的时间,积分控制作用可以完全消除静差,提高控制精度;但若T1太小,则积分作用太强,系统超调加大,反而不能完全消除静差。
3.微分时间常数TD对系统性能的影响
微分控制也不能单独使用,一般与比例控制或微分控制联合使用,构成PD控制器或PID控制器。微分控制对系统性能的影响主要是减小超调量,缩短调节时间,允许加大比例控制,从而减小静差和改善动态特性。当TD偏大时,系统超调较大,调节时间加长;当TD偏小时,微分作用不明显,超调也较大,调节时间也较长;只有当TD值取得合适时,才能得到比较满意的调节品质。
PID参数对系统性能的影响如表3.2所示。
理论和实践都表明,PID控制器的KP、T1、TD各参数与系统的动态和稳态性能关系密切,都起着重要作用。 OB2263AP
1.比例系数KP对系统性能的影响
(1)对动态性能的影响
比例系数KP太小,系统动作缓慢;比例系数KP增大使系统动作灵敏,加快调节速度,但Kp偏大,容易引起系统振荡,反而使调节时间加长,甚至使系统不稳定。
(2)对静态性能的影响
在系统稳定的前提下,加大比例系数KP可以减小静差,提高控制精度,但不能完全消除静差。
2.积分时间常数T1对系统性能的影响
积分控制常与比例和微分控制共同作用,构成PI控制器或PID控制器。
(1)对动态性能的影响
积分时间常数乃太大,积分作用对系统的影响减小,系统响应速度变慢:减小积分时间常数死,系统响应变快,但振荡次数增多,T1偏小,系统振荡加剧,容易使系统不稳定。选择合适的兀值,可使系统的过渡特性比较理想。
(2)对静态性能的影响
只要有足够的时间,积分控制作用可以完全消除静差,提高控制精度;但若T1太小,则积分作用太强,系统超调加大,反而不能完全消除静差。
3.微分时间常数TD对系统性能的影响
微分控制也不能单独使用,一般与比例控制或微分控制联合使用,构成PD控制器或PID控制器。微分控制对系统性能的影响主要是减小超调量,缩短调节时间,允许加大比例控制,从而减小静差和改善动态特性。当TD偏大时,系统超调较大,调节时间加长;当TD偏小时,微分作用不明显,超调也较大,调节时间也较长;只有当TD值取得合适时,才能得到比较满意的调节品质。
PID参数对系统性能的影响如表3.2所示。
 相关技术资料
相关技术资料- 6-27PCB中间的晶振与参考接地板之间的电场分布
- 4-22输出ESD保护
- 10-8数字PID参数整定
 公网安备44030402000607
公网安备44030402000607





