
自动往返小汽车
发布时间:2011/8/18 10:06:08 访问次数:5636
1.任务与要求
设计并制作一个能自动往返于起跑线与终点之间的小汽车。允许用玩具汽车改装,但不能用人工遥控(包括有线遥控和无线遥控)。
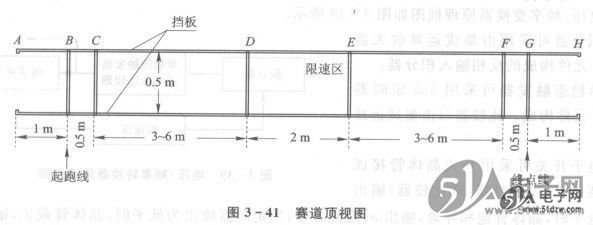
赛道宽度为0.5 m,表面贴有白纸,两侧有挡板,挡板与地面垂直,其高度不低于20cm。在跑道的B、C、D、E、F、G各点处画有2 cm宽的黑线,各段的长度如图3- 41所示
(1)设计要求
①基本部分的要求
・车辆从起跑线出发前,车体不得超出起跑线(允许倒车返回)。到达终点线后停留10s钟,然后自动返回起跑线(允许倒车返回)。往返一次的时间应力求最短(从合上汽车电源开关开始计时)。
・到达终点线和返回起跑线时,停车位置离起跑线和终点线偏差最小(以车辆中心点与终点线或车辆中心点与起跑线中心点之间的距离作为偏差的测量值)。
・D~E之间为限速区,车辆往返均要求以低速通过,通过时间不得小于8s.但不允许在限速区内停车。
②发挥部分的要求
・自动记录、显示一次往返时间(记录显示装置要求安装在车上)。
・自动记录、显示一次行驶距离。
・其他特色与创新。
(2)说明
①不允许在跑道内外区域另外设置任何标志或检测装置。
②车辆(含在车体上附加的任何装置)外围尺寸的限制:长度l≤35cm,宽度6≤15cm。
③必须在车身顶部明显标出车辆中心点位置,即横向与纵向两条中心线的交点。
2、设计分析
根据设计要求,要实现小车运动过程的自动控制,其关键在于选择合适的、性能优良的电动机。步进电动机或伺服电动机启动特性和运行特性良好,准确度高,易于控制。但这种电动机价格太高,用于本设计使性价比增高。而选用启动特性较好,带负载能力强的玩具用电动机同样可以达到本设计的要求,且性价比相对较低。因此,本设计选用玩具用电动机作小车的动力装置。
要完成设计任务的要求,系统必须同时具有模拟电路和数字电路两部分。其中数字部分完成系统的控制算法及各项显示等任务,模拟部分完成信号的检测及对信号的放大、驱动电动机等任务。
(1)电动机调速
直流调速方式有电平调速、脉频调速( PFM)及脉宽调速(PWM)等多种方式。电平调速原理比较简单,但要实现较好的控制会使电路比较复杂。如果需要通过数模转换实现步进控(PFM)计中需要的并行数据线太多,接线麻烦,实际调试复杂,故不用此方案。脉频调速(PFM)一般用于大电动机,对于本设计要求并不适合。而脉宽调速( PWM)接线方便、控制简单,采用光电耦合隔离,系统干扰在三种方式中也最小。因此,本设计中选用了PWM调速方式。
(2)检测电路
在本设计中,需要即时检测小车的行驶速度和三个典型位量。为了实现上述功能,虽有采用光电二极管、光电晶体管的光敏检测和红外检测两种方案可供选择。但通过分析,可知光敏方式容易受到外界干扰,在本设计要求的环境情况下,会使检测工作极不可靠;而红外反射检测方式的信号处理电路简单,工作稳定,检测的可靠性高,因此,选用后者来实现速度和位置检测。另外,对于行驶距离的检测,则可通过测速转盘和红外对管来实现。
(3)控制系统
控制系统可以有多种方案,可以采用单片机、DSP或中小规模集成电路来实现,在此不再着重阐述。
3.设计实现
(1)系统硬件框图
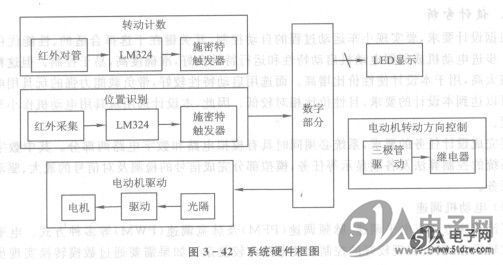
-42据上述分析,同时考虑系统的抗干扰能力和驱动功率等问题,所选系统的硬件框图如图3―42所示。
(2)系统原理简介
图3 - 42由两大DSP组成:数字系统部分和模拟系统部分。数字系统部分可以有多种实现方法,例如单片机、DSP或用传统的中小规模集成器件组成,在此采用单片机实现系统的控制算法,这里不详细叙述。
模拟系统部分和前面所介绍的内容类似,包括一个输入信道、一个输出信道。下面分别介绍。 EL2244CS
1.任务与要求
设计并制作一个能自动往返于起跑线与终点之间的小汽车。允许用玩具汽车改装,但不能用人工遥控(包括有线遥控和无线遥控)。
赛道宽度为0.5 m,表面贴有白纸,两侧有挡板,挡板与地面垂直,其高度不低于20cm。在跑道的B、C、D、E、F、G各点处画有2 cm宽的黑线,各段的长度如图3- 41所示
(1)设计要求
①基本部分的要求
・车辆从起跑线出发前,车体不得超出起跑线(允许倒车返回)。到达终点线后停留10s钟,然后自动返回起跑线(允许倒车返回)。往返一次的时间应力求最短(从合上汽车电源开关开始计时)。
・到达终点线和返回起跑线时,停车位置离起跑线和终点线偏差最小(以车辆中心点与终点线或车辆中心点与起跑线中心点之间的距离作为偏差的测量值)。
・D~E之间为限速区,车辆往返均要求以低速通过,通过时间不得小于8s.但不允许在限速区内停车。
②发挥部分的要求
・自动记录、显示一次往返时间(记录显示装置要求安装在车上)。
・自动记录、显示一次行驶距离。
・其他特色与创新。
(2)说明
①不允许在跑道内外区域另外设置任何标志或检测装置。
②车辆(含在车体上附加的任何装置)外围尺寸的限制:长度l≤35cm,宽度6≤15cm。
③必须在车身顶部明显标出车辆中心点位置,即横向与纵向两条中心线的交点。
2、设计分析
根据设计要求,要实现小车运动过程的自动控制,其关键在于选择合适的、性能优良的电动机。步进电动机或伺服电动机启动特性和运行特性良好,准确度高,易于控制。但这种电动机价格太高,用于本设计使性价比增高。而选用启动特性较好,带负载能力强的玩具用电动机同样可以达到本设计的要求,且性价比相对较低。因此,本设计选用玩具用电动机作小车的动力装置。
要完成设计任务的要求,系统必须同时具有模拟电路和数字电路两部分。其中数字部分完成系统的控制算法及各项显示等任务,模拟部分完成信号的检测及对信号的放大、驱动电动机等任务。
(1)电动机调速
直流调速方式有电平调速、脉频调速( PFM)及脉宽调速(PWM)等多种方式。电平调速原理比较简单,但要实现较好的控制会使电路比较复杂。如果需要通过数模转换实现步进控(PFM)计中需要的并行数据线太多,接线麻烦,实际调试复杂,故不用此方案。脉频调速(PFM)一般用于大电动机,对于本设计要求并不适合。而脉宽调速( PWM)接线方便、控制简单,采用光电耦合隔离,系统干扰在三种方式中也最小。因此,本设计中选用了PWM调速方式。
(2)检测电路
在本设计中,需要即时检测小车的行驶速度和三个典型位量。为了实现上述功能,虽有采用光电二极管、光电晶体管的光敏检测和红外检测两种方案可供选择。但通过分析,可知光敏方式容易受到外界干扰,在本设计要求的环境情况下,会使检测工作极不可靠;而红外反射检测方式的信号处理电路简单,工作稳定,检测的可靠性高,因此,选用后者来实现速度和位置检测。另外,对于行驶距离的检测,则可通过测速转盘和红外对管来实现。
(3)控制系统
控制系统可以有多种方案,可以采用单片机、DSP或中小规模集成电路来实现,在此不再着重阐述。
3.设计实现
(1)系统硬件框图
-42据上述分析,同时考虑系统的抗干扰能力和驱动功率等问题,所选系统的硬件框图如图3―42所示。
(2)系统原理简介
图3 - 42由两大DSP组成:数字系统部分和模拟系统部分。数字系统部分可以有多种实现方法,例如单片机、DSP或用传统的中小规模集成器件组成,在此采用单片机实现系统的控制算法,这里不详细叙述。
模拟系统部分和前面所介绍的内容类似,包括一个输入信道、一个输出信道。下面分别介绍。 EL2244CS
上一篇:电压/频率变换器
上一篇:数字显示与简易数字设计
 相关技术资料
相关技术资料- 8-18自动往返小汽车
热门点击
 公网安备44030402000607
公网安备44030402000607





