
磁环转子S极恰好接近位置检测器则检测器输出高电平信号
发布时间:2022/10/19 21:01:01 访问次数:167
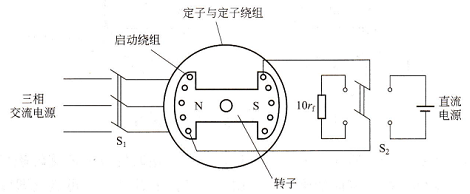
结构无刷直流电动机的结构。从图中可看出,无刷直流电动机主要由定子铁芯、定子绕组、位置检测器、磁铁转子和驱动电路等组成。
位置检测器包括固定和运动两部分,运动部分安装在转子轴上。
与转子联动,它可以反映转子的磁极位置.固定部分通过它就可以检测出转子的位置信息.有些无刷直流电动机的位置检测 器无运转部分,它直接检测转子位置信息。驱动电路的功能是根据位置检测器送来的位置信号,用电子开关(如二极管)来切换定子绕组的电源。
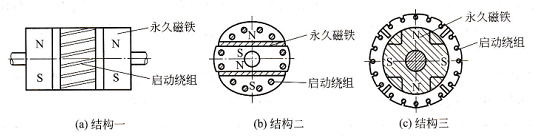
无刷直流电动机的转子结构分为表面式磁极、嵌入式磁极和环形磁极3种。
表面式磁极转子是将磁铁粘贴在转子铁芯表面,嵌入式磁极转子是将磁铁嵌人铁芯中,环形磁极转子是在转子铁芯上套一个环形磁铁。
在r1期间,Hl信号为高电平.H2、H3信号为低电平,三极管VT1导通,有电流流过A相绕组,绕组产生磁场推动转子运转。在r2期间,H2信号为高电平,Hl、H3信号为低电平,三极管VT2导通,有电流流过B相绕组,绕组产生磁场推动转子运转。在r3期间,H3信号为高电平.H1、H2信号为低电平.三极管VT3导通,有电流流过C相绕组,绕组产生磁场推动转子运转。
r1以后,电路重复上述过程,电动机连续运转起来。三相半桥驱动电路结构简单,但由于同一时刻只有一相绕组工作,电动机的效率较低,并且转子运转脉动比较大,即运转时容易时快时慢。
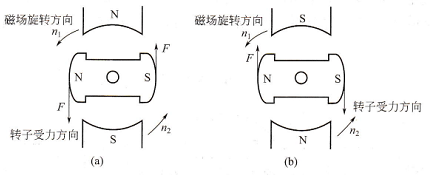
无刷直流电动机工作原理说明如下。
无刷直流电动机位置检测器距离磁环转子很近,磁环转子的不同磁极靠近检测器时,检测器输出不同的位置信号(电信号)。
假设S极接近位置检测器时,检测器输出高电平信号,N极接近检测器时输出低电平信号。
在启动电动机时.若磁环转子的S极恰好接近位置检测器,则检测器输出高电平信号,该信号送到三极管VT1、VT2的基极,VT1导通,VT2截止,定子绕组L1,I'1有电流流过,电流途径是:电源LIcc-L1-LI→vT1-地。
结构无刷直流电动机的结构。从图中可看出,无刷直流电动机主要由定子铁芯、定子绕组、位置检测器、磁铁转子和驱动电路等组成。
位置检测器包括固定和运动两部分,运动部分安装在转子轴上。
与转子联动,它可以反映转子的磁极位置.固定部分通过它就可以检测出转子的位置信息.有些无刷直流电动机的位置检测 器无运转部分,它直接检测转子位置信息。驱动电路的功能是根据位置检测器送来的位置信号,用电子开关(如二极管)来切换定子绕组的电源。
无刷直流电动机的转子结构分为表面式磁极、嵌入式磁极和环形磁极3种。
表面式磁极转子是将磁铁粘贴在转子铁芯表面,嵌入式磁极转子是将磁铁嵌人铁芯中,环形磁极转子是在转子铁芯上套一个环形磁铁。
在r1期间,Hl信号为高电平.H2、H3信号为低电平,三极管VT1导通,有电流流过A相绕组,绕组产生磁场推动转子运转。在r2期间,H2信号为高电平,Hl、H3信号为低电平,三极管VT2导通,有电流流过B相绕组,绕组产生磁场推动转子运转。在r3期间,H3信号为高电平.H1、H2信号为低电平.三极管VT3导通,有电流流过C相绕组,绕组产生磁场推动转子运转。
r1以后,电路重复上述过程,电动机连续运转起来。三相半桥驱动电路结构简单,但由于同一时刻只有一相绕组工作,电动机的效率较低,并且转子运转脉动比较大,即运转时容易时快时慢。
无刷直流电动机工作原理说明如下。
无刷直流电动机位置检测器距离磁环转子很近,磁环转子的不同磁极靠近检测器时,检测器输出不同的位置信号(电信号)。
假设S极接近位置检测器时,检测器输出高电平信号,N极接近检测器时输出低电平信号。
在启动电动机时.若磁环转子的S极恰好接近位置检测器,则检测器输出高电平信号,该信号送到三极管VT1、VT2的基极,VT1导通,VT2截止,定子绕组L1,I'1有电流流过,电流途径是:电源LIcc-L1-LI→vT1-地。
 相关技术资料
相关技术资料- 7-5CV/CC InnoSwitch3-AQ 开关电源 IC
- 7-5URF1DxxM-60WR3系列应用前景分析
- 7-51-6W URA24xxN-xxWR3G系列优势特征
- 7-5闭环磁通门信号调节芯片NSDRV401
- 7-5SK-RiSC-SOM-H27X-V1.1应用探究
- 7-5RISC技术8位微控制器参数设计
- 7-4超低功耗角度位置传感器参数技术封装
- 7-4四路输出 DC/DC 降压电源模块产品系列
- 7-4降压变换器和升降压变换器优特点及区别
- 7-4业界首创可在线编程电源模块 mEZ系列
- 7-4可编程门阵列 (FPGA)智能 电源解决方案
- 7-4高效先进封装工艺MPS 电源模块优势设计
 公网安备44030402000607
公网安备44030402000607





