
2D��3D�������Ҫͼ����Ҫ��̬��Χ����130dB
����ʱ��:2022/9/14 0:26:10 ���ʴ���:399
����ͷ���״�����״�����ִ�����������ȱ�㡣��ˣ������ԭʼ�豸�����̳���ʹ��������������������ϣ�������䣬�ֲ����㡣
�����ʹ��ʱ,���������������ó����ڼ�������Ҫ�˹���Ԥ������°�ȫ��ʻ�����Ŵ������������������,Ԥ��δ�����꽫��Խ��Խ��ij����ﵽL3--L4�����Զ���ʻˮƽ��
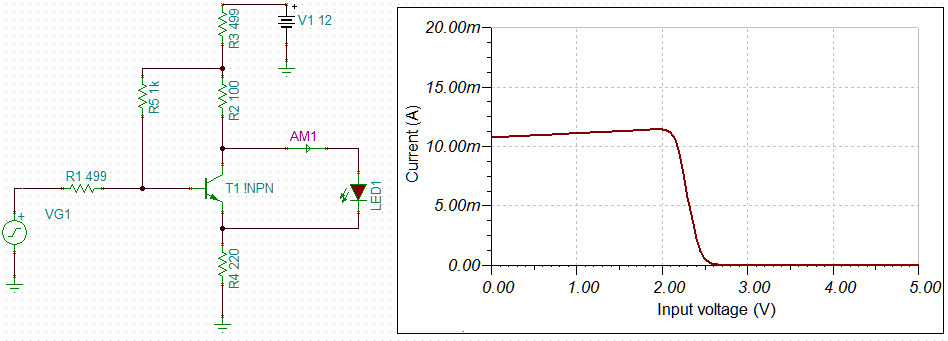
���ڴ���������������ɵģ��Դ�����Ҳ���п��̵�Ҫ��2D��3D�������Ҫͼ��������Ҫ���䶯̬��Χ����130dB�����ָ߶�̬��Χ���ṩ����ͼ��ıر�����Ŀǰ��������õ�ͼ�����Ķ�̬��Χ�Ѿ��ﵽ140dB��

FG650-EAUĬ�ϲ���6���ߣ�ͬʱ����4������ƣ����ý������FWAҵ��Ķ�����ָ��ĸ�Ҫ��
64λVR4181A�Dz���0.25��VR4121 CPU�ˣ����ٶȸߴ�131MHz��157������ָ��/��(MIPS)�������������16B MIPSָ��ϵͳ����������������ȫ����ʱ���IJ�500mW��VR4181A��������18�����Ͻӿڣ��Թ���ý�壬����ͨѶ�ͻ��������Ӧ�á�
����ģ�ܻ�����ķ�װ��оƬ����װ����о�ߴ���դ���з�װ���ʹ���DAP�ķ�װ���ķ���ƽ������ [QFN]��װ��˫�߱�ƽ������[DFN]��װ����רΪ��Ҫ��PCB���ٽ����ȴ��ݵ�Ӧ�ö���Ƶģ������� DAP�ķ�װ��רΪ��Ҫ������Ӧ���ʵ�Ӧ�ö���Ƶġ�
���ٵ�����Ӧ����ʹ�¶ȴ������ܹ�������Ӧ�κ��¶ȱ仯���Ӷ��ṩȷ�Ķ�����
������λ��Ӧ�����ܿ���Ҫ������Դ��Ӧ�����ڷ���IC ���¶ȴ�����֮���PCB�ϴ����пڣ���Ϊ����ܻ��������ֹ����Ӧ��������ܣ��뽫�¶ȼ������װ��PCB�ײ�ֱ��λ����Դ�·���
ʹ�ù���������PCB��һ����ٴ��ݵ���һ�࣬��Ϊ��FR-4��ȣ������и��õ�ͭ�����ԡ�
����ͷ���״�����״�����ִ�����������ȱ�㡣��ˣ������ԭʼ�豸�����̳���ʹ��������������������ϣ�������䣬�ֲ����㡣
�����ʹ��ʱ,���������������ó����ڼ�������Ҫ�˹���Ԥ������°�ȫ��ʻ�����Ŵ������������������,Ԥ��δ�����꽫��Խ��Խ��ij����ﵽL3--L4�����Զ���ʻˮƽ��
���ڴ���������������ɵģ��Դ�����Ҳ���п��̵�Ҫ��2D��3D�������Ҫͼ��������Ҫ���䶯̬��Χ����130dB�����ָ߶�̬��Χ���ṩ����ͼ��ıر�����Ŀǰ��������õ�ͼ�����Ķ�̬��Χ�Ѿ��ﵽ140dB��
FG650-EAUĬ�ϲ���6���ߣ�ͬʱ����4������ƣ����ý������FWAҵ��Ķ�����ָ��ĸ�Ҫ��
64λVR4181A�Dz���0.25��VR4121 CPU�ˣ����ٶȸߴ�131MHz��157������ָ��/��(MIPS)�������������16B MIPSָ��ϵͳ����������������ȫ����ʱ���IJ�500mW��VR4181A��������18�����Ͻӿڣ��Թ���ý�壬����ͨѶ�ͻ��������Ӧ�á�
����ģ�ܻ�����ķ�װ��оƬ����װ����о�ߴ���դ���з�װ���ʹ���DAP�ķ�װ���ķ���ƽ������ [QFN]��װ��˫�߱�ƽ������[DFN]��װ����רΪ��Ҫ��PCB���ٽ����ȴ��ݵ�Ӧ�ö���Ƶģ������� DAP�ķ�װ��רΪ��Ҫ������Ӧ���ʵ�Ӧ�ö���Ƶġ�
���ٵ�����Ӧ����ʹ�¶ȴ������ܹ�������Ӧ�κ��¶ȱ仯���Ӷ��ṩȷ�Ķ�����
������λ��Ӧ�����ܿ���Ҫ������Դ��Ӧ�����ڷ���IC ���¶ȴ�����֮���PCB�ϴ����пڣ���Ϊ����ܻ��������ֹ����Ӧ��������ܣ��뽫�¶ȼ������װ��PCB�ײ�ֱ��λ����Դ�·���
ʹ�ù���������PCB��һ����ٴ��ݵ���һ�࣬��Ϊ��FR-4��ȣ������и��õ�ͭ�����ԡ�
 ��ؼ�������
��ؼ�������- 7-7AMOLED��ʾ����оƬ�ؼ�������Ӧ��
- 7-7CMOSͼ���������������
- 7-7GB300 ����оƬӦ���������
- 7-74NP ����NVIDIA Blackwell �ܹ� GPU
- 7-7GB300 оƬ��NVL72 ϵͳ��Һ�似��̽��
- 7-7�����¸߶�оƬ�˹����ܷ�����ϵͳ
- 7-5CV/CC InnoSwitch3-AQ ���ص�Դ IC
- 7-5URF1DxxM-60WR3ϵ��Ӧ��ǰ������
- 7-51-6W URA24xxN-xxWR3Gϵ����������
- 7-5�ջ���ͨ���źŵ���оƬNSDRV401
- 7-5SK-RiSC-SOM-H27X-V1.1Ӧ��̽��
- 7-5RISC����8������������
�������
- ��ЧӦ�����©��D��Դ��s֮�����ֵ��դ����
- IR2136���ɵ�·������ʡ����ܵĵ�������
- ��ͨ�˲����ⲿ��������ADC�������������г�
- 2D��3D�������Ҫͼ����Ҫ��̬��Χ��
- ���������绰����ƽ������Դ�������ɵ�·����
- ��ͥ���ز�Ʒ��ȫ�������С��VDSL�������
- ����ֵ̫С��Ҫ���˲����ݲ���ʵ����ͬ�ĨC3d
- ���Ƶ�������ZigBee�����������ѹ����
- �����������Ư���Լ���������ṩ����У��
- �������ԺͲ����������1.2��F���Ը��ػ�1
�Ƽ���������
- Seeed Studio
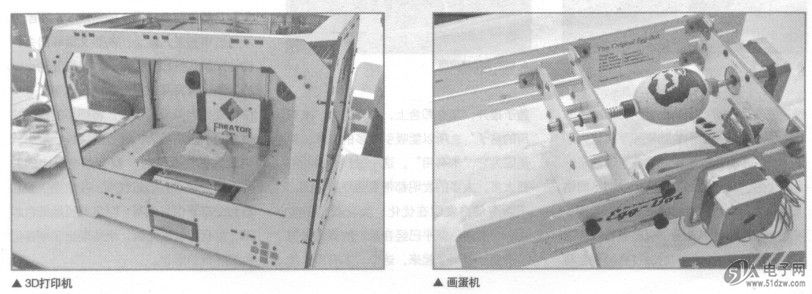
- Seeed Studio����ǵ�ӡ�����Ǻͻ滭���벻��... [��ϸ]
 ��������44030402000607
��������44030402000607





