
���ɿ���Ƶ�ʽӿڵ�������
����ʱ��:2020/3/24 18:44:22 ���ʴ���:1474
SUPI3BT�������ʰ��������ض��ն˵�˫���ߣ��� BasicCAN �Ĺ淶�����Ĵ��������ܴﵽ 250KBaud ����PeliCAN �ܴﵽ 1Mbaud�� �������������·�����ϵͳ�������˵�����ģ� ������������ִ�� CAN Э��IJ����С���Щ�����д��м��� CAN �ӿڵ��������� 8051 ���ݵ� Philips P97C591 �������� 16 λ�� Philisp XA82C200 SJA1000 ��һ�������� CAN �������� �����Ժͺܶ�������ֱ�ӽӿڣ� ���������������ӿ����÷��벿������ 82C250 TJA1050 ���ɵ�·�����Ƶķ���ʵ�֡�
��Ҫ����:
����ʽ����֧�ܣ�2.95-V��16-V PVIN��2.95-V��18-V AVIN��4-VIN VDD5�����л���
����4.5-m��/0.9-m��mosfet
��ѡ���ڲ�������ƽ������ģʽ����
2����3x��4���ɶѵ������������ߴ�160 A��ÿ�����֧��һ����ַ
ͨ�����Ŵ���ѡ��0.6-V��5.5-V�������ʹ��PMBus VOUT U�����ѡ��0.25-V��6.0-V���
�㷺��PMBus���������ң��ܡ�������ڲ�ģ���¶�
�ڲ�FB��ѹ���IJ��ң��С��1%������C40��C��+150��C TJ
ͨ��PMBus�ṩAVS�ͱ�֤������
MSEL�������ű��PMBusĬ��ֵ
12����ѡ����Ƶ�ʣ�225 kHzto 1.5 MHz��8�����ѡ�
Ƶ��ͬ������/���
֧��Ԥƫѹ���
֧��ǿ��ϵ��
7���ס�5���ס�1.5���ף�40��QFN���ݾ�=0.5����
ʹ�ô���WEBENCH®Power Designer��TPS546D24A�����Զ������
������������ CAN ���� ISO ����Ĵ���ͨѶ���ߡ�Ҫ���иߵ�λ���ʡ��߿���Ÿ����ԣ������ܹ������������κδ������� CAN ����ͨѶ���߾�����Щ���ԣ�CAN ͨѶЭ�����������豸֮����Ϣ��δ��ݣ����Բ�Ķ����뿪��ϵͳ����ģ�� OSI һ�£�ÿһ������һ�豸����ͬ����һ��ͨѶ��ʵ�ʵ�ͨѶ�Ƿ�����ÿһ�豸�����ڵ����㣬���豸ֻͨ��ģ����������������ʻ��� CAN �Ľṹ������ģ�͵�����������㣬 ������·��������㡢Ӧ�ò�ͨ����ͬ������Э��㣬ר����������Ĺ�ҵ��������ɸ��� CAN �û�������κκ��ʵķ��������������ӡ�������õ� CAN Э�鹤ҵ��Ҳ������ Allen-Bradley �� DeviceNet ����Ϊ PLC �����ܴ�������Ƶġ�
�����б��ܴ���ӿƼ�����˾http://jkic888.51dzw.com/
(�ز���Դ��eccn��21IC.�����Ȩ����ϵɾ�����ر��л��
SUPI3BT�������ʰ��������ض��ն˵�˫���ߣ��� BasicCAN �Ĺ淶�����Ĵ��������ܴﵽ 250KBaud ����PeliCAN �ܴﵽ 1Mbaud�� �������������·�����ϵͳ�������˵�����ģ� ������������ִ�� CAN Э��IJ����С���Щ�����д��м��� CAN �ӿڵ��������� 8051 ���ݵ� Philips P97C591 �������� 16 λ�� Philisp XA82C200 SJA1000 ��һ�������� CAN �������� �����Ժͺܶ�������ֱ�ӽӿڣ� ���������������ӿ����÷��벿������ 82C250 TJA1050 ���ɵ�·�����Ƶķ���ʵ�֡�
��Ҫ����:
����ʽ����֧�ܣ�2.95-V��16-V PVIN��2.95-V��18-V AVIN��4-VIN VDD5�����л���
����4.5-m��/0.9-m��mosfet
��ѡ���ڲ�������ƽ������ģʽ����
2����3x��4���ɶѵ������������ߴ�160 A��ÿ�����֧��һ����ַ
ͨ�����Ŵ���ѡ��0.6-V��5.5-V�������ʹ��PMBus VOUT U�����ѡ��0.25-V��6.0-V���
�㷺��PMBus���������ң��ܡ�������ڲ�ģ���¶�
�ڲ�FB��ѹ���IJ��ң��С��1%������C40��C��+150��C TJ
ͨ��PMBus�ṩAVS�ͱ�֤������
MSEL�������ű��PMBusĬ��ֵ
12����ѡ����Ƶ�ʣ�225 kHzto 1.5 MHz��8�����ѡ�
Ƶ��ͬ������/���
֧��Ԥƫѹ���
֧��ǿ��ϵ��
7���ס�5���ס�1.5���ף�40��QFN���ݾ�=0.5����
ʹ�ô���WEBENCH®Power Designer��TPS546D24A�����Զ������
������������ CAN ���� ISO ����Ĵ���ͨѶ���ߡ�Ҫ���иߵ�λ���ʡ��߿���Ÿ����ԣ������ܹ������������κδ������� CAN ����ͨѶ���߾�����Щ���ԣ�CAN ͨѶЭ�����������豸֮����Ϣ��δ��ݣ����Բ�Ķ����뿪��ϵͳ����ģ�� OSI һ�£�ÿһ������һ�豸����ͬ����һ��ͨѶ��ʵ�ʵ�ͨѶ�Ƿ�����ÿһ�豸�����ڵ����㣬���豸ֻͨ��ģ����������������ʻ��� CAN �Ľṹ������ģ�͵�����������㣬 ������·��������㡢Ӧ�ò�ͨ����ͬ������Э��㣬ר����������Ĺ�ҵ��������ɸ��� CAN �û�������κκ��ʵķ��������������ӡ�������õ� CAN Э�鹤ҵ��Ҳ������ Allen-Bradley �� DeviceNet ����Ϊ PLC �����ܴ�������Ƶġ�
�����б��ܴ���ӿƼ�����˾http://jkic888.51dzw.com/
(�ز���Դ��eccn��21IC.�����Ȩ����ϵɾ�����ر��л��
��һƪ������ĵĵ�ѹ���ڵĽ���ģʽ
 ��ؼ�������
��ؼ�������- 7-16��߶˴��ģPCB���ƽ̨UniVista Archer
- 7-16Android ��Linux OS����ԭ��
- 7-16TLE9879 SSCģ���봫����Ӧ��̽��
- 7-16˫�߾��� RTD �¶ȴ�����BW-AH-5520
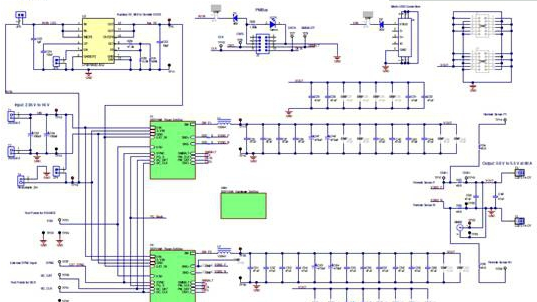
- 7-1616V/12A�ɵ��ڵ�ѹ��Ƶ��ͬ����ѹ�任��
- 7-16NOR Flash��NAND Flash��չ���
- 7-15�߷��ӻ������������Ӧ��̽��
- 7-15��Ч����4kW˫��PFC��Դ�������
- 7-15��ɢ�뵼��Ԫ��������ܡ������ܵȣ������������
- 7-15CommonGround Human AI���ļ�����
- 7-15520�߳��漶���ֻ������״�Ӧ��ǰ��
- 7-15MPronto-12 (M12 Push Pull ������R
�������
- PQ30RV31 ����Ԫ���ϵ��������������
- VI-2ND-EZ ����������״�����Զ��
- SDK-AC4486-5A ���ĵ���Դ����
- XC2S200E-6FG456
- JANS2N2222A ��ԴRFIDϵͳ��2
- NJM2864F03(TE1) ��ѹ��ѹ����
- EP1S10F672C7N ���ʺ�ɢ���ֳ���
- STV2180-3B �˲�����������Ӧ����һ
- BD4824G ��װ���ͱ�����װ���������
- MX99402AZC ȼ�����ַ�������������
�Ƽ���������

- ��ѩ��������
- ������һ��dz���Ȥ��ͬʱ����һ�������Ѷȵ��淨��EDE2116AB... [��ϸ]
 ��������44030402000607
��������44030402000607





