
ESC11SE62041P60尾翼的组成垂直安定面
发布时间:2019/11/16 21:21:08 访问次数:3857
ESC11SE62041P60增量对飞机重心形成的力矩是低头力矩,阻止飞机抬头水平距离飞机重心最远,气动力面积最大,所以,俯仰阻尼力矩主要由水平尾翼产生尾翼(见图4-8)。
纵向扰动运动的模态及其特征,定常直线飞行的飞机受到扰动后,在回到原平衡姿态过程中产生的扰动运动可以简化看成是由两种典型周期性运动模态叠加而成:一种是周期很短、衰减很快的短周期模态,如图4-9所示;另一种是周期长、衰减很慢的长周期模态,如图4-10所示。
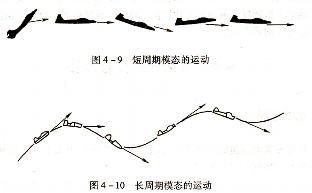
短周期模态的运动,长周期模态的运动
短周期运动模态,这种运动模态主要发生在干扰消失后的最初阶段。飞枧的扰动运动主要是飞机绕重心的摆动过程,表现为迎角和俯仰角速度周期性迅速变化,雨飞行速度则基本上保持不变。
扰动消失的最初阶段,飞机上产生的静稳定力矩迫使飞机返回原飞行姿态,从而使飞机产生较大的绕横轴转动的角加速度9使飞机的迎角和俯仰角速度迅速变化。到达原平衡姿态时,由于运动惯性,飞机会继续转动并超过原平衡位置,又会产生方向相反的静稳定力矩,迫使飞机再回到原飞行姿态,从而使飞机产生相反方向的转动角加速度,使飞机的迎角和俯仰角速度又向相反的方向迅速变化。于是,就形成了迎角和俯仰角速度周期性迅速变化的短周期运动模态。在俯仰摆动过程中,飞机上的气动力分布产生与飞机转动角速度方向相反的较大的俯仰阻尼力矩(见图4-8),使飞机的俯仰摆动很快衰减下来。一般情况下,飞机的这种短期振荡运动在开始的头几秒内就基本结束了。飞机上的纵向力矩也基本恢复到原来的平衡状态,扰动运动过程如图4-9所示。
长周期运动模态,这种运动模态主要发生在扰动运动的后一阶段。飞机的扰动运动主要是飞机重心运动的振荡过程,表现为飞行速度和航迹倾斜角周期性的缓慢变化,飞机的迎角基本恢复到原来的迎角并保持不变。
在短周期振荡运动基本结束时,纵向力矩基本恢复平衡,飞机基本不再绕横轴转动,但由于飞行速度增量的作用,作用在飞机上的外力仍处于不平衡状态,飞机的航迹是弯曲的。重力、升力、阻力和发动机推力的相互作用,使飞机的高度增加,速度和升力随之减小,航迹逐渐转为向下弯曲;随后,飞机的高度减小,速度和升力随之增加,航迹又逐渐转为向土弯曲。如此反复进行,就形成了飞机重心上、下缓慢振荡。振荡过程如图4-10所示。这一振荡过程衰减很慢,形成长周期运动模态。
在飞行过程中,驾驶员对这两种运动模态的感觉和要求是不同的。对于短周期模态,运动参数迎角、俯仰角速度变化快,驾驶员往往来不及反应并予以制止,因而影响到飞行安全、乘员的舒适和操纵反应特性等,所以对这种模态提出的要求较高。为了保证飞行的安全,CCAR-25部规定:在主操纵处于松浮状态或固定状态时,在相应于飞机形态的失速速度与最大允许速度之间产生的任何短周期振荡,必须受到重阻尼。对于长周期模态,因为它振荡周期长,运动参数速度、航迹角变化缓慢,驾驶员有足够的时间进行纠正,所以对这种模态特性的要求就比前者要低。
飞机的纵向操纵性,水平尾翼,飞机的水平尾翼是由前面的固定不动(或安装角可调)的水平安定面和后面可绕转轴偏转的升降舵组成,如图4-11所示。
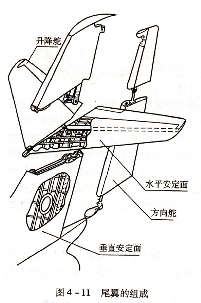
当升降舵偏转或调整水平安定面的配平角时,产生的附加升力对飞机重心形成了附加的纵向力矩,以保持飞机在不同状态下的纵向平衡和对飞机进行纵向操纵。升降舵偏角用εz表示,规定当舵面后缘向下偏转时,εz>0,后缘向上偏转时,εz<<>0。
飞机的纵向操纵,飞机的纵向操纵是由驾驶员通过驾驶杆、传动系统等改变升降舵的偏转角来实现的。
根据驾驶员的生理习惯,正常的操作动作是:驾驶员向前推杆,舵面应向下偏转(εz>0),平尾上产生的附力Ⅱ升力向上,对重心产生的附加纵向力矩Δmz<0,迫使飞机低头,减小迎角,增大飞行速度;驾驶员向后拉杆,舵面应向上偏转(εz<0),
平尾上产生的附加升力向下,对重心产生的附加纵向力矩Δmz>0,迫使飞机抬头,增大迎角,减少飞行速度,如图4-12所示。由此可知,升降舵偏角εz与所产生的附加力矩Δmz的符号相反。
水平尾翼另一个重要作用是对飞机进行纵向操纵。尾翼的组成垂直安定面.
ESC11SE62041P60增量对飞机重心形成的力矩是低头力矩,阻止飞机抬头水平距离飞机重心最远,气动力面积最大,所以,俯仰阻尼力矩主要由水平尾翼产生尾翼(见图4-8)。
纵向扰动运动的模态及其特征,定常直线飞行的飞机受到扰动后,在回到原平衡姿态过程中产生的扰动运动可以简化看成是由两种典型周期性运动模态叠加而成:一种是周期很短、衰减很快的短周期模态,如图4-9所示;另一种是周期长、衰减很慢的长周期模态,如图4-10所示。
短周期模态的运动,长周期模态的运动
短周期运动模态,这种运动模态主要发生在干扰消失后的最初阶段。飞枧的扰动运动主要是飞机绕重心的摆动过程,表现为迎角和俯仰角速度周期性迅速变化,雨飞行速度则基本上保持不变。
扰动消失的最初阶段,飞机上产生的静稳定力矩迫使飞机返回原飞行姿态,从而使飞机产生较大的绕横轴转动的角加速度9使飞机的迎角和俯仰角速度迅速变化。到达原平衡姿态时,由于运动惯性,飞机会继续转动并超过原平衡位置,又会产生方向相反的静稳定力矩,迫使飞机再回到原飞行姿态,从而使飞机产生相反方向的转动角加速度,使飞机的迎角和俯仰角速度又向相反的方向迅速变化。于是,就形成了迎角和俯仰角速度周期性迅速变化的短周期运动模态。在俯仰摆动过程中,飞机上的气动力分布产生与飞机转动角速度方向相反的较大的俯仰阻尼力矩(见图4-8),使飞机的俯仰摆动很快衰减下来。一般情况下,飞机的这种短期振荡运动在开始的头几秒内就基本结束了。飞机上的纵向力矩也基本恢复到原来的平衡状态,扰动运动过程如图4-9所示。
长周期运动模态,这种运动模态主要发生在扰动运动的后一阶段。飞机的扰动运动主要是飞机重心运动的振荡过程,表现为飞行速度和航迹倾斜角周期性的缓慢变化,飞机的迎角基本恢复到原来的迎角并保持不变。
在短周期振荡运动基本结束时,纵向力矩基本恢复平衡,飞机基本不再绕横轴转动,但由于飞行速度增量的作用,作用在飞机上的外力仍处于不平衡状态,飞机的航迹是弯曲的。重力、升力、阻力和发动机推力的相互作用,使飞机的高度增加,速度和升力随之减小,航迹逐渐转为向下弯曲;随后,飞机的高度减小,速度和升力随之增加,航迹又逐渐转为向土弯曲。如此反复进行,就形成了飞机重心上、下缓慢振荡。振荡过程如图4-10所示。这一振荡过程衰减很慢,形成长周期运动模态。
在飞行过程中,驾驶员对这两种运动模态的感觉和要求是不同的。对于短周期模态,运动参数迎角、俯仰角速度变化快,驾驶员往往来不及反应并予以制止,因而影响到飞行安全、乘员的舒适和操纵反应特性等,所以对这种模态提出的要求较高。为了保证飞行的安全,CCAR-25部规定:在主操纵处于松浮状态或固定状态时,在相应于飞机形态的失速速度与最大允许速度之间产生的任何短周期振荡,必须受到重阻尼。对于长周期模态,因为它振荡周期长,运动参数速度、航迹角变化缓慢,驾驶员有足够的时间进行纠正,所以对这种模态特性的要求就比前者要低。
飞机的纵向操纵性,水平尾翼,飞机的水平尾翼是由前面的固定不动(或安装角可调)的水平安定面和后面可绕转轴偏转的升降舵组成,如图4-11所示。
当升降舵偏转或调整水平安定面的配平角时,产生的附加升力对飞机重心形成了附加的纵向力矩,以保持飞机在不同状态下的纵向平衡和对飞机进行纵向操纵。升降舵偏角用εz表示,规定当舵面后缘向下偏转时,εz>0,后缘向上偏转时,εz<<>0。
飞机的纵向操纵,飞机的纵向操纵是由驾驶员通过驾驶杆、传动系统等改变升降舵的偏转角来实现的。
根据驾驶员的生理习惯,正常的操作动作是:驾驶员向前推杆,舵面应向下偏转(εz>0),平尾上产生的附力Ⅱ升力向上,对重心产生的附加纵向力矩Δmz<0,迫使飞机低头,减小迎角,增大飞行速度;驾驶员向后拉杆,舵面应向上偏转(εz<0),
平尾上产生的附加升力向下,对重心产生的附加纵向力矩Δmz>0,迫使飞机抬头,增大迎角,减少飞行速度,如图4-12所示。由此可知,升降舵偏角εz与所产生的附加力矩Δmz的符号相反。
水平尾翼另一个重要作用是对飞机进行纵向操纵。尾翼的组成垂直安定面.
 相关技术资料
相关技术资料- 7-14NeuPro NPUs+ SensPro DSP技术参数设计
- 7-14双通道ATA-2022H高压放大器
- 7-14旗舰大模型Grok 4、Grok 4 API发展趋势
- 7-14耦合仿真技术及高保真模型试验技术应用探究
- 7-14GPU、FPGA、ASIC。GPU、FPGA技术解释
- 7-14ASIC/FPGA/GPU芯片及边缘-云端
- 7-12PWM输入功率驱动器工作原理
- 7-12隔离式 DC/DC 变换器和模块优势特征
- 7-12解读集成4 个高效降压 DC/DC 变换器
- 7-12数字隔离功能全集成 DC/DC 电源变换器简述
- 7-12集成低噪声电流输入模数转换器 (ADC)应用详解
- 7-12128 通道20 位电流数字转换器应用探究
 公网安备44030402000607
公网安备44030402000607





