

模拟了检测轴作为质量块-弹簧-阻尼系统集总参数模型的动力学特性
发布时间:2019/4/28 20:21:59 访问次数:1697
图5.9模拟了检测轴作为质量块-弹簧-阻尼系统集总参数模型的动力学特性。系统从力的输入到位移的输出有一个传递函数 3s分别是质量和阻尼因数;屁s是我们旨在观察和最终控制的可变刚度。模式匹配的任务是当感应谐振频率等于驱动频率时使佬s接近最优化的刚度南s,。pt=msω:。这需要监测实际刚度与最优值的偏差。

稳定闭环系统的反馈路径决定了闭环响应,只要开环增益远大于一。我们利用此属性将感应单元的特性与反馈回路的其余部分隔离,方法是选择一个校准输入,仅将感测动力学置于反馈路径中。图
5.10描述了增加校准输人的力反馈回路。我们分别通过位移转换电压增益Kxˉv和电压转换力增益替换了前端和力传感器。假设高开环增益,从校准输人到输出的传递函数为 图5,10 带有额外校准输人的力反馈环(动态感应关于校准输人在反馈路径上)增项氏~f和氏~v只影响Ccd(s)的静态增益,并且不是复零点的位置。图5.11比
较了Jrs(s)和εcd(s)的频率响应。Ccd(s)的切齿(nc,tch)和⒛°相位超前恰好反映了谐振处〃s(s)的峰值和⒛°才目位延迟,虽然相反,但使得qd(s)成为Jrs (s)极好的的代替。在某种意义上,qd(s)比ffs(s)更可取,因为它避免了在〃s(s)的高Q极点,这严重地限制了基于频率校准技术的传统的开环感应的跟踪带宽。
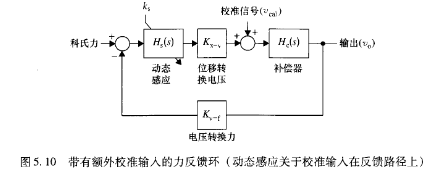
图5.9模拟了检测轴作为质量块-弹簧-阻尼系统集总参数模型的动力学特性。系统从力的输入到位移的输出有一个传递函数 3s分别是质量和阻尼因数;屁s是我们旨在观察和最终控制的可变刚度。模式匹配的任务是当感应谐振频率等于驱动频率时使佬s接近最优化的刚度南s,。pt=msω:。这需要监测实际刚度与最优值的偏差。
稳定闭环系统的反馈路径决定了闭环响应,只要开环增益远大于一。我们利用此属性将感应单元的特性与反馈回路的其余部分隔离,方法是选择一个校准输入,仅将感测动力学置于反馈路径中。图
5.10描述了增加校准输人的力反馈回路。我们分别通过位移转换电压增益Kxˉv和电压转换力增益替换了前端和力传感器。假设高开环增益,从校准输人到输出的传递函数为 图5,10 带有额外校准输人的力反馈环(动态感应关于校准输人在反馈路径上)增项氏~f和氏~v只影响Ccd(s)的静态增益,并且不是复零点的位置。图5.11比
较了Jrs(s)和εcd(s)的频率响应。Ccd(s)的切齿(nc,tch)和⒛°相位超前恰好反映了谐振处〃s(s)的峰值和⒛°才目位延迟,虽然相反,但使得qd(s)成为Jrs (s)极好的的代替。在某种意义上,qd(s)比ffs(s)更可取,因为它避免了在〃s(s)的高Q极点,这严重地限制了基于频率校准技术的传统的开环感应的跟踪带宽。
 相关技术资料
相关技术资料- 4-28模拟了检测轴作为质量块-弹簧-阻尼系统集总参数模型的动力学特性
- 4-24传感器中校准数据的存储

 公网安备44030402000607
公网安备44030402000607





