
空载电流将超前Φ一个铁损耗角ε提供分辨率以数千PPR
发布时间:2022/3/31 13:08:32 访问次数:199
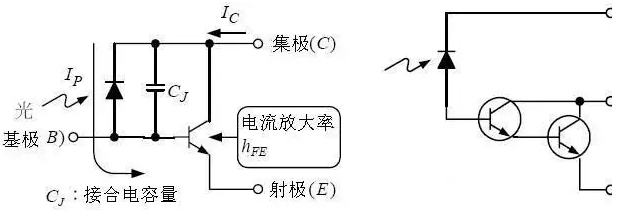
电机定子中嵌入了检测转子位置的霍尔效应传感器,这样就可以切换三相电桥中的晶体管来驱动电机。三个霍尔效应传感器输出一般标记为 U、V 和 W 通道。虽然霍尔效应传感器能够有效解决 BLDC 电机换向问题,但它们仅仅满足了 BLDC 系统一半所需。
六步霍尔效应输出和梯形电机相位,换向通道和电机相位理想对准,而对双极电机而言,仅为每一机械循环六个状态。与能提供分辨率以数千 PPR(每转脉冲数)计的增量编码器(可解码为状态变化次数的四倍)相比,两者均需的必要性就显而易见了。
BLDC电机运行后,相线都有反电动势。
设当前电机电频率为f, 单位为Hz。
反电动势的峰值电压为 ,单位为伏特。
设反电动势从center tap value到最大值的时间为t1, 而 。
那么蓝色积分区域的积分值就等于蓝色三角形的面积:
可以看到,积分结果是Kv值的 ,因此积分结果也是几乎不变的。
实际变压器的空载运行实际变压器空载运行时,空载电流将超前Φ一个铁损耗角ε,一次绕组中将产生漏磁阻抗压降,一次电压平衡方程为:U1=-E1+rOzs1=-Ih+r1rO+Xs1rO,实际变压器空载运行原理图、相量。
实际变压器的空载运行,a)原理图 b)相量图
变压器负载运行时,一次电流由rO变为凡,当ui一定时,主磁通Φ基本不变,磁势平衡方程为rl Ⅳ1+r2Ⅳ2=rOⅣ1,即r1=l+(ur2)。一次电压平衡方程为:y1=uE1+zs1 rl=-E1十rs1r1,二次电势平衡方程为E2=I2+r2r2+JXmr2=r2zfz+r,zs2=r,z,或写为:u2=E2-rzs2=r2z

电机定子中嵌入了检测转子位置的霍尔效应传感器,这样就可以切换三相电桥中的晶体管来驱动电机。三个霍尔效应传感器输出一般标记为 U、V 和 W 通道。虽然霍尔效应传感器能够有效解决 BLDC 电机换向问题,但它们仅仅满足了 BLDC 系统一半所需。
六步霍尔效应输出和梯形电机相位,换向通道和电机相位理想对准,而对双极电机而言,仅为每一机械循环六个状态。与能提供分辨率以数千 PPR(每转脉冲数)计的增量编码器(可解码为状态变化次数的四倍)相比,两者均需的必要性就显而易见了。
BLDC电机运行后,相线都有反电动势。
设当前电机电频率为f, 单位为Hz。
反电动势的峰值电压为 ,单位为伏特。
设反电动势从center tap value到最大值的时间为t1, 而 。
那么蓝色积分区域的积分值就等于蓝色三角形的面积:
可以看到,积分结果是Kv值的 ,因此积分结果也是几乎不变的。
实际变压器的空载运行实际变压器空载运行时,空载电流将超前Φ一个铁损耗角ε,一次绕组中将产生漏磁阻抗压降,一次电压平衡方程为:U1=-E1+rOzs1=-Ih+r1rO+Xs1rO,实际变压器空载运行原理图、相量。
实际变压器的空载运行,a)原理图 b)相量图
变压器负载运行时,一次电流由rO变为凡,当ui一定时,主磁通Φ基本不变,磁势平衡方程为rl Ⅳ1+r2Ⅳ2=rOⅣ1,即r1=l+(ur2)。一次电压平衡方程为:y1=uE1+zs1 rl=-E1十rs1r1,二次电势平衡方程为E2=I2+r2r2+JXmr2=r2zfz+r,zs2=r,z,或写为:u2=E2-rzs2=r2z
 相关技术资料
相关技术资料- 7-15高分子混合铝电解电容器应用探究
- 7-15高效节能4kW双向PFC电源方案解读
- 7-15离散半导体元件(晶体管、二极管等)技术参数设计
- 7-15CommonGround Human AI核心技术简
- 7-15520线车规级数字化激光雷达应用前景
- 7-15MPronto-12 (M12 Push Pull 连接器R
- 7-14NeuPro NPUs+ SensPro DSP技术参数设计
- 7-14双通道ATA-2022H高压放大器
- 7-14旗舰大模型Grok 4、Grok 4 API发展趋势
- 7-14耦合仿真技术及高保真模型试验技术应用探究
- 7-14GPU、FPGA、ASIC。GPU、FPGA技术解释
- 7-14ASIC/FPGA/GPU芯片及边缘-云端

 公网安备44030402000607
公网安备44030402000607





